NoteAction
Wipe clean o-ring and o-ring groove.5
Refit the o-ring.
Tip
Lubricate the o-ring with some grease for
a better fitting in the groove.
6
CAUTION
When fitting the motor cover, make sure
that none of the cables inside will be dam-
aged.
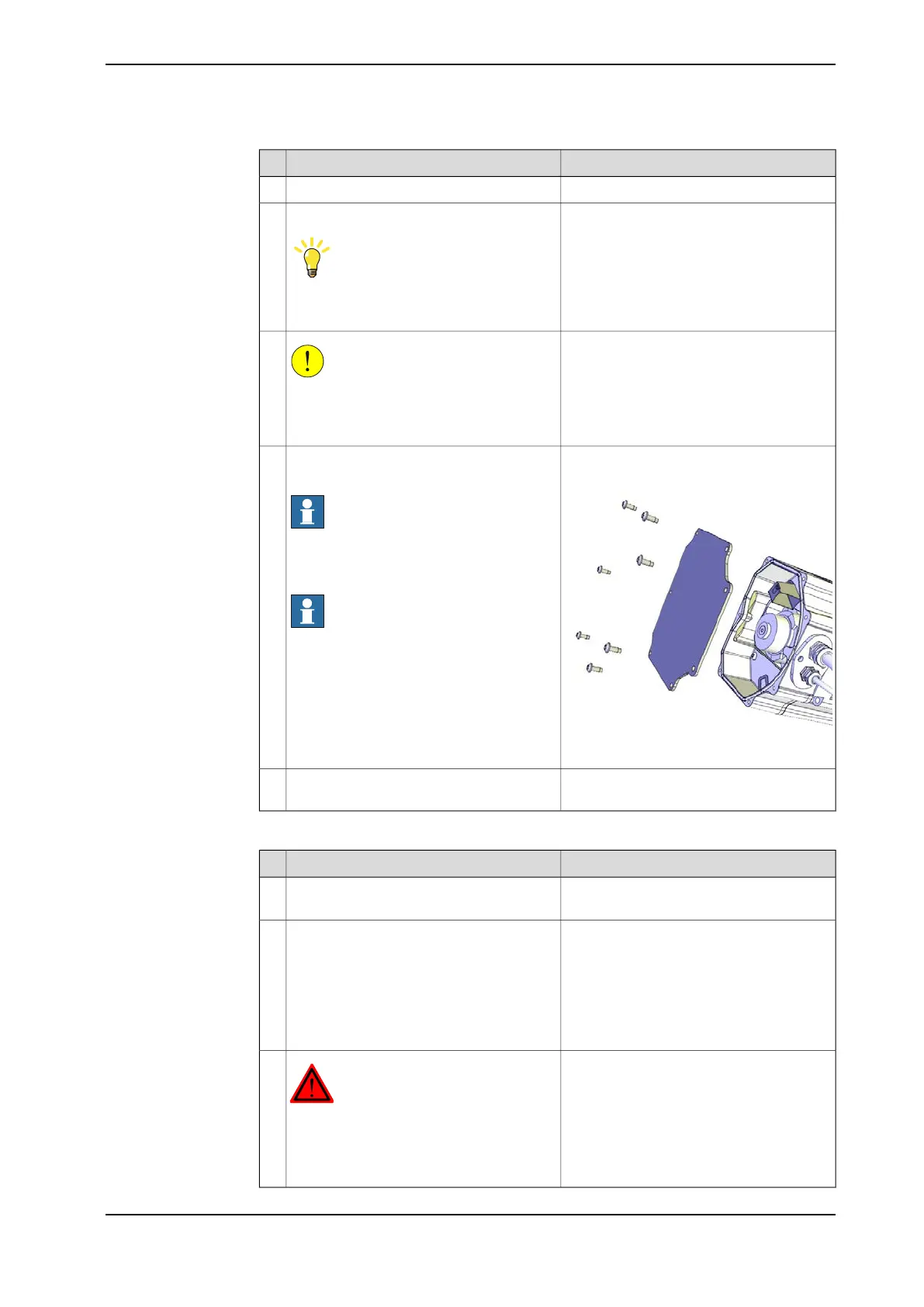
7
Attachment screws: M5x12 8.8 (7 pcs)
xx1200001135
Refit the motor cover with its attachment
screws.
Note
Do not reuse the self-threading attachment
screws. Replace with standard attachment
screws or the threads will be damaged.
Note
Make sure the o-ring is undamaged and
properly fitted.
8
Make sure that the covers are tightly
sealed.
9
Concluding procedure
NoteAction
See Filling oil into the axis-4 gearbox on
page 178.
Refill the gearbox with oil, if gearbox has
been drained.
1
Pendulum Calibration is described in Oper-
ating manual - Calibration Pendulum, en-
closed with the calibration tools.
Re-calibrate the robot.2
Axis Calibration is described in Calibrating
with Axis Calibration method on page 798.
General calibration information is included
in section Calibration on page 787.
DANGER
Make sure all safety requirements are met
when performing the first test run. These
are further described in First test run may
cause injury or damage on page 26.
3
Product manual - IRB 6700 553
3HAC044266-001 Revision: N
© Copyright 2013 - 2018 ABB. All rights reserved.
4 Repair
4.7.4 Replacing the axis-4 motor
Continued

 Loading...
Loading...





