4.3 Exercise 1: program displacement
About the exercise
This exercise demonstrates how a program displacement works.
Note
The exercises later in this guide will not be as detailed as this one. Please take
the time to understand this exercise before attempting others.
Instruction
Action
Create a new program module. Name it ST_TEST.1
Create a new routine in that module and name it disp_ex1.2
If not already done, define the tool using the five point method or BullsEye. Name
the tool tWeldGun.
3
To make programming easier you can add in these instructions into one of your Most
Common pick lists:
PDispAdd
PDispOff
PDispSet
Search_1D
Search_Groove
Search_Part
Tape a piece of paper to a table, or similar surface, within the robot's reach. On the
paper draw a rectangle.
4
View the modules, select the new module ST_TEST, and select the new routine,
disp_ex1.
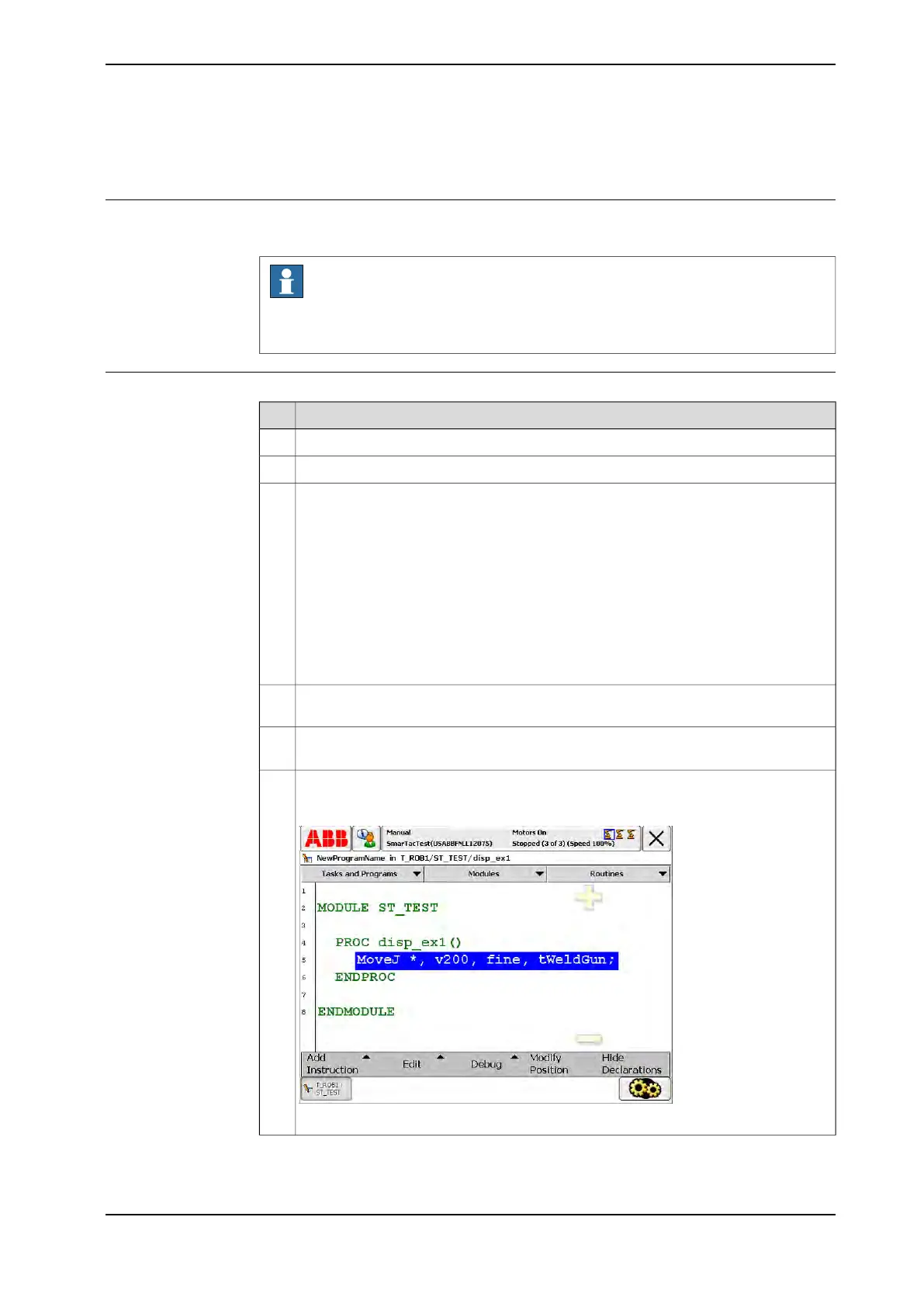
5
Jog the robot so that the torch is pointing at the rectangle on the paper. The tip of
the torch should be a few inches above the rectangle. Create a MoveJ at this point
using tWeldGun and no work object selected.
xx1400001480
6
Continues on next page
Application manual - SmarTac 35
3HAC024845-001 Revision: A
© Copyright 2004-2016 ABB. All rights reserved.
4 User's guide
4.3 Exercise 1: program displacement
 Loading...
Loading...






