Publication 1756-UM001G-EN-P - January 2007
116 Configure Redundancy
Redundancy and Scan Time
The primary controller stops at the end of every program to crossload
fresh data to the secondary controller. This keeps the secondary
controller up-to-date and ready to take over. It also increases the scan
time when compared to a nonredundant system.
The amount of time a crossload consumes depends on how much
data the primary controller has to crossload:.
• The primary controller crossloads any tag to which an
instruction wrote a value, even the same value, since the last
crossload.
• Crossloading also requires a small amount of overhead time to
tell the secondary controller which program the primary
controller is executing.
Minimum System
Requirements
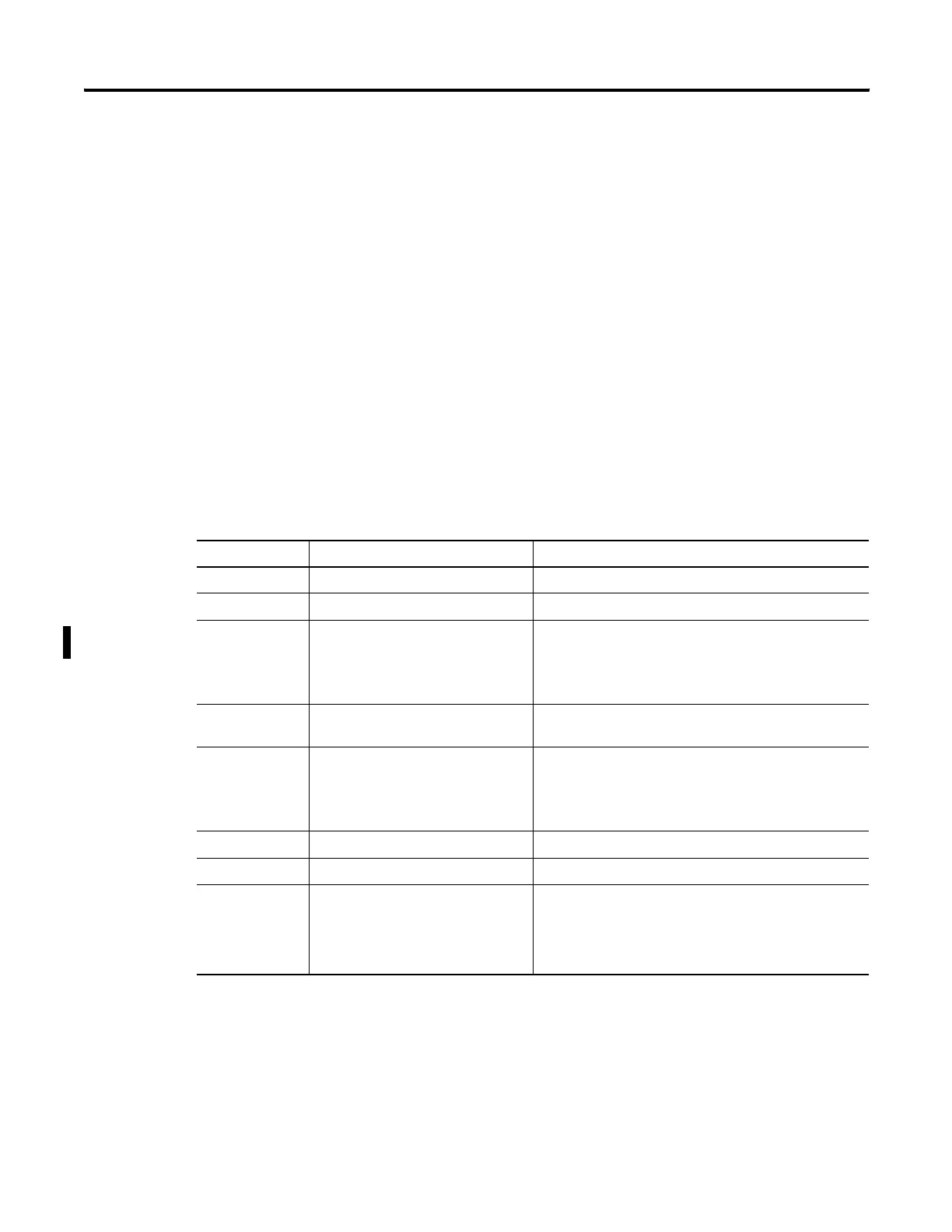
At a minimum, a ControlLogix redundancy system must contain these
items.
Quantity Item Notes
2 ControlLogix chassis Both chassis must be the same size.
2 ControlLogix power supply
2 ControlLogix controller • Use either 1756-L55, 1756-L61, 1756-L62, 1756-L63,
or 1756-L64 controllers.
• Use the same catalog number and memory size
controllers in each chassis.
2 ControlLogix ControlNet
communication module
Use series D modules.
2 ControlLogix 10/100 Mbps
Ethernet/IP communication module
• Optional
• You can use a second pair of 1756 ControlNet
communication modules for HMI/workstation
communication.
2 1757 system redundancy module
1 1757 system redundancy cable Standard lengths are available.
2 Additional ControlNet nodes • Place all I/O in remote chassis or din rails.
• Use a ControlNet network for all I/O.
• Add at least 2 nodes to each ControlNet network in
addition to the redundant chassis pair.
 Loading...
Loading...
