18 - English
1. FUNCTION
In order to quickly test an installation, the delay times
for the boundary wire and the guide wires should be
temporarily set to 0 minutes. Automower
®
will not then
make an Irregular search, but will directly start to
search for the boundary wire and guide wires.
The Irregular search method means that the
Automower
®
runs in an irregular pattern until it finds
the F-field some 6 metres from the charging station,
or until the value of the F-signal is higher than 2.
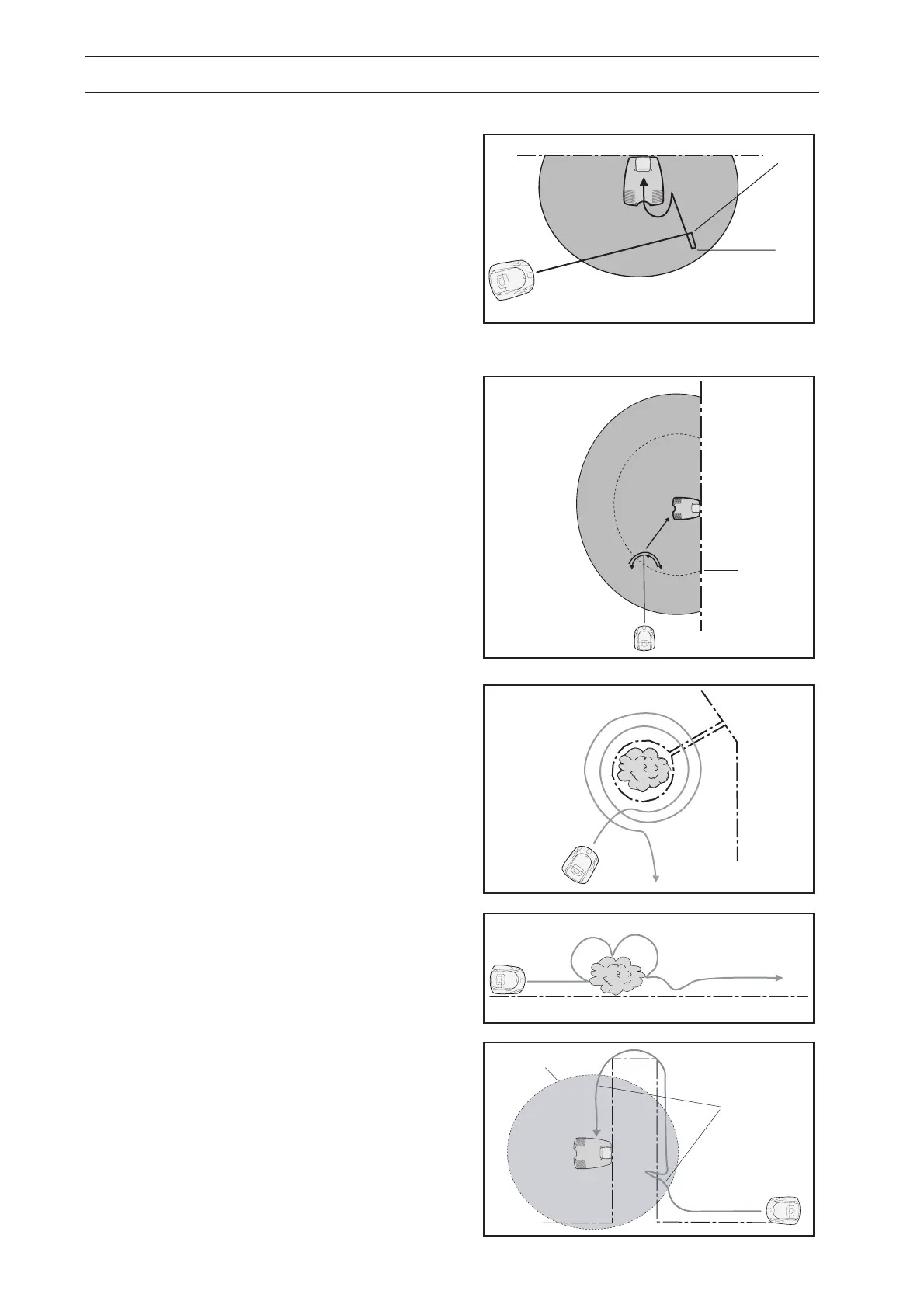
When the Automower
®
is in the F-field, it turns 180°
respective 90° to find the N-signal and the charging
station.
When the mower follows the boundary loop, it drives
a short way into the F-field and fixes its bearing when
the F-value reaches 25 (which corresponds to 4 m
(13 ft) from the charging station, see figure).
Depending on the fixed bearings, the mower either
leaves the boundary loop and starts to orientate itself
towards the charging station, through 90/180 degree
turns, or continues to follow the boundary loop once
more towards the charging station.
When the boundary wire is laid around an island, the
Automower
®
follows the loop around the island about
two turns before leaving the island and continuing to
run until it finds the boundary wire in another location.
Should the Automower
®
hit an obstacle when
following the boundary wire it passes this by making
one or more turns around the obstacle.
Depending on the placement of the charging station,
the Automower
®
may be forced to leave the F-field to
reach the charging station. The mower then follows
the boundary wire out of the F-field. First it runs
10 metres (30 ft) from the F-field in one direction
before it turns and follows the boundary wire
20 metres (60 ft) from the F-field in the other
direction. Should the Automower
®
then not reach the
F-field, it turns for a third time and follows the
boundary wire in the first direction until it reaches the
charging station.
90°
180°
Automower
®
fixes its bearings
F = 25
Fix
bearings
F = 25 (4 m, 13 ft)

 Loading...
Loading...