Automatic detection of motor data
10
Function library
10.9
L
10.9-1
EDS82EV903-1.0-11/2002
10.9 Automatic detection of motor data
This function serves to detect the required motor data and the motor cable
influences.
Must be done before the first commissioning of vector control (C0014 = 4) or
sensorless torque control (C0014 = 5). Otherwise commissioning is not possible.
)
))
) Note!
The motor parameter identification influences the smooth running
behaviour in the control mode ”V/f characteristic control with
constant U
min
boost” (C0014 = 2 or 3). If you identify the motor
parameters for this control mode, you can optimise the smooth
running behaviour for low speeds.
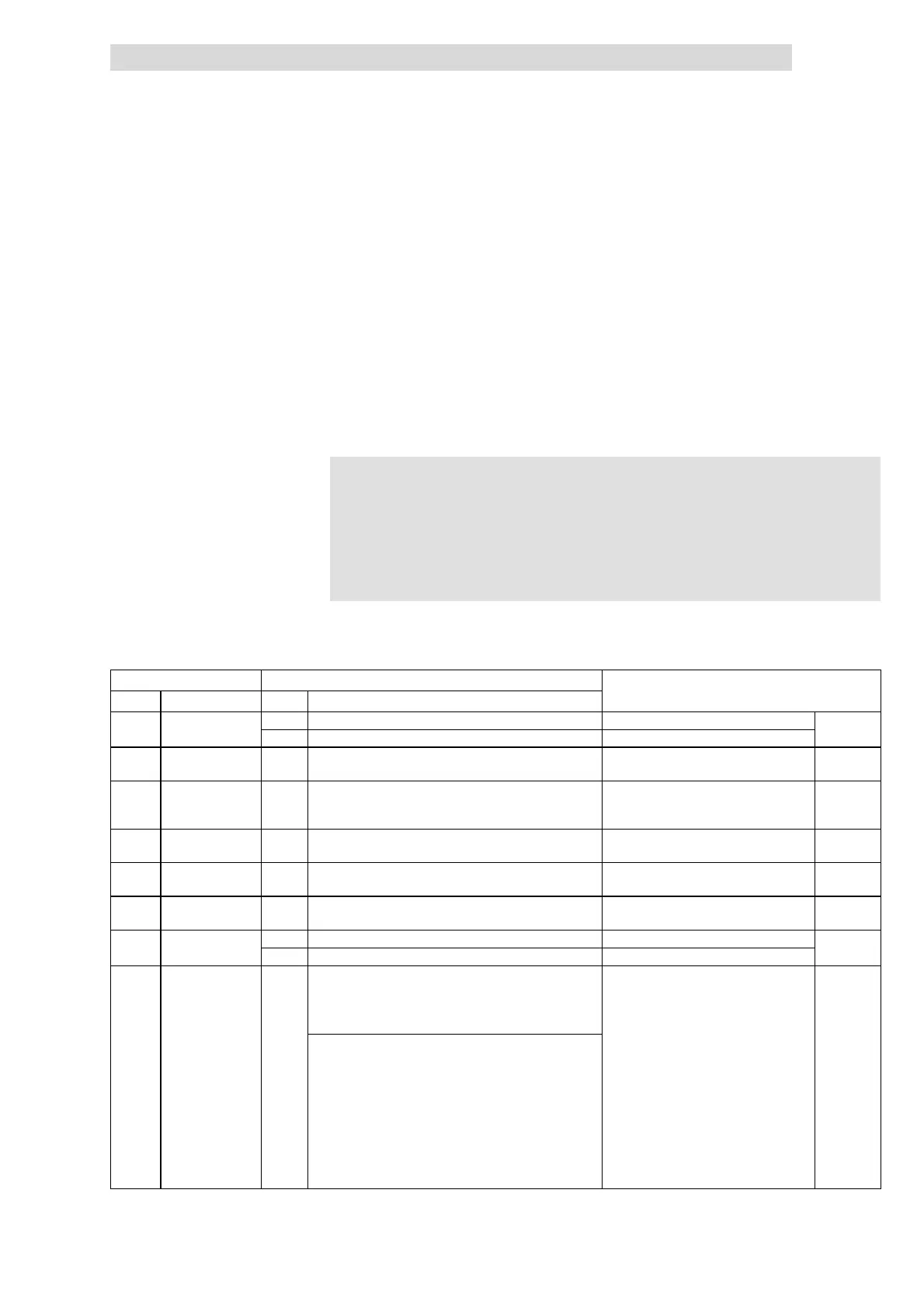
Codes for parameter setting
Code Possible settings IMPORTANT
No. Name Lenze Selection
C0084 Motor stator
0.000 0.000 {0.001 Ω} 64.000
^ 10.9-1
resistance
0.0 0.0 {0.1 m Ω} 6500.0 Only 8200 vector 15 ... 90 kW
C0087 Rated motor speed à 300 {1 rpm} 16000 à Depending on the controller ^ 10.9-1
C0088 Rated motor
current
à 0.0 {0.1 A} 650.0 à Depending on the controller
0.0 ... 2.0 x rated output current of the
controller
^ 10.9-1
C0089 Rated motor
frequency
50 10 {1 Hz} 960 ^ 10.9-1
C0090 Rated motor
voltage
à 50 {1 V} 500 à 230 V with 230 V controllers,
400 V with 400 V controllers
^ 10.9-1
C0091 Motor cos j à 0.40 {0.1} 1.0 à Depending on the controller ^ 10.9-1
C0092 Motor stator
0.0 0.000 {0.1 mH} 200.0
^ 10.9-1
inductance
0.00 0.00 {0.01 mH} 200.00 Only 8200 vector 15 ... 90 kW
C0148*
s
Motor parameter
identification
0
0 Ready
Only when the motor is cold!
1. Inhibit controller , wait until drive is in
standstill
2. Enter the correct motor data under
^ 10.9-1
1 Start identification
• V/f-rated frequency (C0015), slip
compensation (C0021) and motor stato r
inductivity (C0092) a re calculated and saved.
• The motor stator resistance (C0084) = total
resistance of motor cable and motor is
measured and saved
,
,
,
,
(see motor nameplate).
3. C0148 = set 1 by
v
4. Enable controller
The identification
–starts,
c gets out
– the motor makes a high-pitched tone,
but does not rotate!
– takes approx. 30 s
– is completed when
c is on again
5. Controller inhibit
Description
 Loading...
Loading...