Chapter 8 Adjustment
8–30
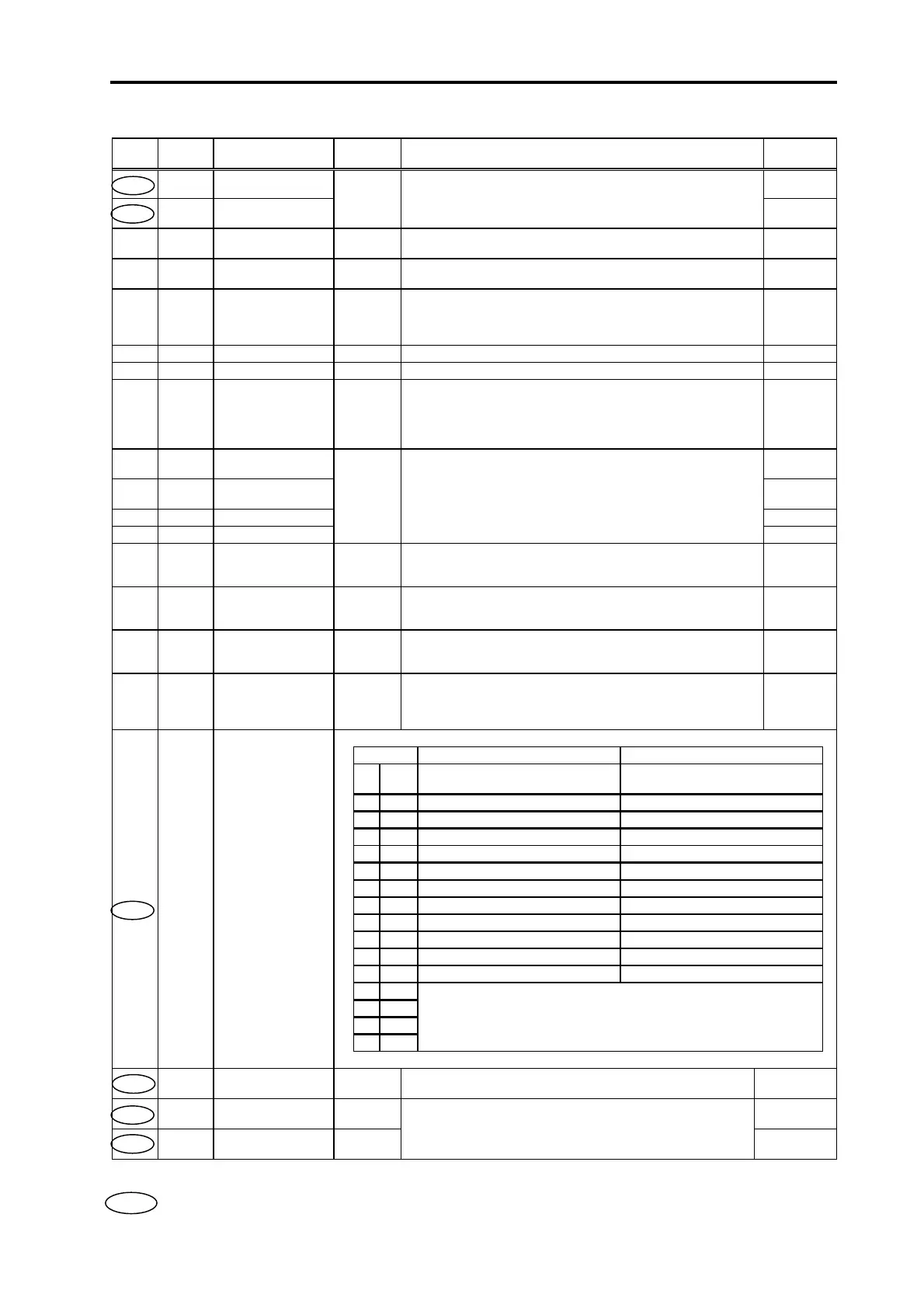
8-6 Parameter list
No. Abbrev. Parameter name Unit Explanation
Setting
range
SV001 PC1 Motor side gear ratio 1 to 32767
SV002 PC2
Machine side gear
ratio
Set the motor side and machine side gear ratio.
For the rotary axis, set the total deceleration (acceleration) ratio.
Even if the gear ratio is within the setting range, the electronic
gears may overflow and cause an alarm.
1 to 32767
SV003 PGN1 Position loop gain 1 rad/sec
Set the position loop gain. Set 33 as a standard.
When using SHG control, also set PGN2 and SHGC.
1 to 200
SV004 PGN2 Position loop gain 2 rad/sec
Set 0 as a standard.
When using SHG control, also set PGN1 and SHGC.
0 to 999
SV005 VGN1 Speed loop gain
Set this according to the motor inertia size.
If motor resonance occurs, lower the value by 20 to 30% at a time.
The setting value should be 70 to 80% of the value where
resonance does not occur.
1 to 999
SV006 Set "0". 0
SV007 Set "0". 0
SV008 VIA
Speed loop leading
compensation
Set 1364 as a standard. During SHG control, set 1900 as a
standard.
Raise this value to improve contour tracking precision in high-
cutting. Lower this value when the position droop vibrates.
Adjust by 100 at a time.
1 to 9999
SV009 IQA
q axis leading
compensation
1 to 20480
SV010 IDA
d axis leading
compensation
1 to 20480
SV011 IQG q axis gain 1 to 2560
SV012 IDG d axis gain
This setting is determined by the motor's electrical characteristics.
Set the standard parameters for all parameters. (These are used
for maker adjustments.)
1 to 2560
SV013 ILMT Current limit value
Stall %
(rated
current %)
Set the standard parameter value. The maximum torque is
determined by the motor specifications.
0 to 500
SV014 ILMTsp
Current limit value
during special
operation
Stall %
(rated
current %)
Set the standard parameter value.
Set the limit torque mainly for the stopper.
0 to 500
SV015 FFC
Acceleration feed
forward gain
%
The standard setting value is 0. For SGH control, set 100.
To improve the acceleration/deceleration characteristics, increase
the value by 50 to 100 at a time.
1 to 999
SV016 LMC1
Lost motion
compensation 1
Stall %
(rated
current %)
The protrusion amount during quadrant changeover is suppressed.
Adjust in 5% units.
When LMC2 is set to 0, the setting value will apply in both the ±
directions.
–1 to 200
bit Meaning when "0" is set Meaning when "1" is set
0 dmk
Deceleration controlo stop selection
(SVJ2 standard)
Dynamic brake stop selection
1
2
3
4
5
6
7 abs Incremental control Absolute position control
8
9
10
11
12 mtc
13
14
15
Motor table selection according to model
Set 0100 for the intelligent servomotor HS Series.
SV017 SPEC Servo specifications
Set "0" in bits with no particular description.
SV018 PIT Ball screw pitch mm
Set the ball screw pitch. Set 360 for the rotary axis.
Refer to the CNC Instruction Manual for the inch ball screw.
1 to 32767
SV019 RNG1
Position detector
resolution
kp/rev 8 to 100
SV020 RNG2
Speed detector
resolution
kp/rev
Set the motor detector resolution for both settings.
Refer to the Standard parameter list per motor for the settings.
8 to 100
SV001 is a parameter validated when the NC power is turned ON again.
 Loading...
Loading...
