Skydio X2D Attitude Mode
Attitude Mode allows you to disable the visual and GPS navigation, for flight in GPS-denied environments, or where there is the potential for jamming.
Designed to be flown by expert pilots, you have direct stick control of the aircraft’s throttle, yaw, pitch, and roll angles, rather than relying on automatic
altitude and position stabilization. All autonomous functions, such as automatic position hold Return to Home and Obstacle Avoidance, are disabled.
Requires minimum vehicle software release version 19.4.18 and Enterprise Controller software release version 20.1.30.
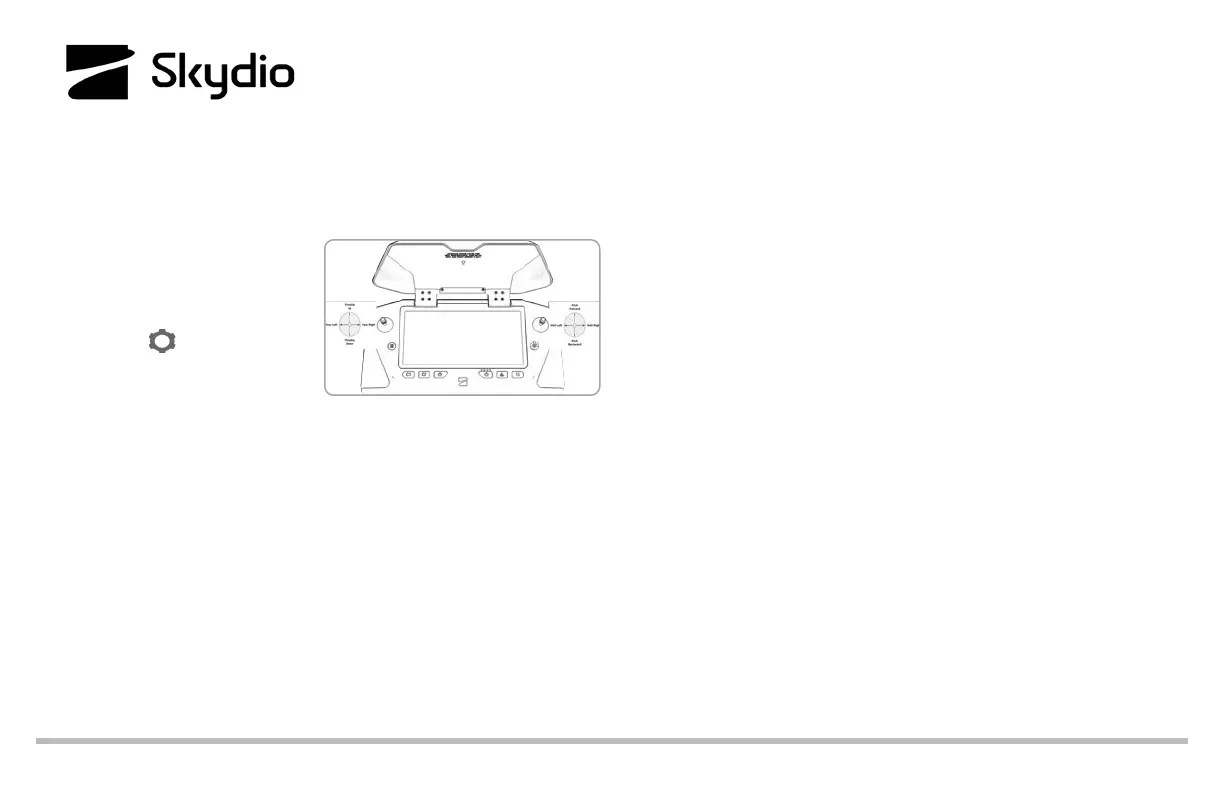
Throttle - controls lift, ascend and descend
Yaw - rotates the drone around its center
Pitch - controls forward and backward
Roll - controls right and left
Step 1 - Select Device settings
Step 2 - Select the Drone tab
Step 3 - Select Vehicle Mode
Step 4 - Select Attitude
• the drone will reboot and calibrate
Launch
Step 5 - Select Begin Flight and Arm the motors
• hold the throttle joystick down in a full-throttle down position
• press and hold the launch/land button for 1 second
• the motors will start to spin at idle speed
Step 6 - Maintain a full-throttle down until you are ready to launch
• steadily throttle up through a neutral position
• apply a quick upward thrust to the throttle joystick to launch
• steadily increase altitude by continuing to throttle up
© 2022 Skydio, Inc. All rights reserved.
• avoid sudden or aggressive pitch or roll inputs. This will put the drone
into a hard bank causing the propeller blades to strike the ground
• there is no position hold - stabilizing your X2D in the wind requires
actively correcting the roll and pitch
• there is no altitude hold - your X2D will gain and lose altitude if you are
not actively correcting
• forward speed is capped by the maximum forward pitch angle
• there is no autonomous return - you will need to manually return and
land when the battery is low
• you must have a good RF connection between your controller and X2D
• a lost connection - will result in an emergency land in place
• if a connection is regained, the landing will be canceled and you will
regain full control.
• obstacle avoidance is disabled
Land
Step 7 - Fly to a clear, level, and safe landing area and slowly descend using
the throttle joystick
• there are no autonomous landing or return features
Step 8 - Simultaneously press L2 and R2 to disarm
• X2D will not automatically detect touchdown
Flight control sensitivity is locked and
cannot be customized
 Loading...
Loading...