(26...16 AWG): All terminals.
Run status
Fault status
Damper actuator
max.
500 ohm
1…10 kohm
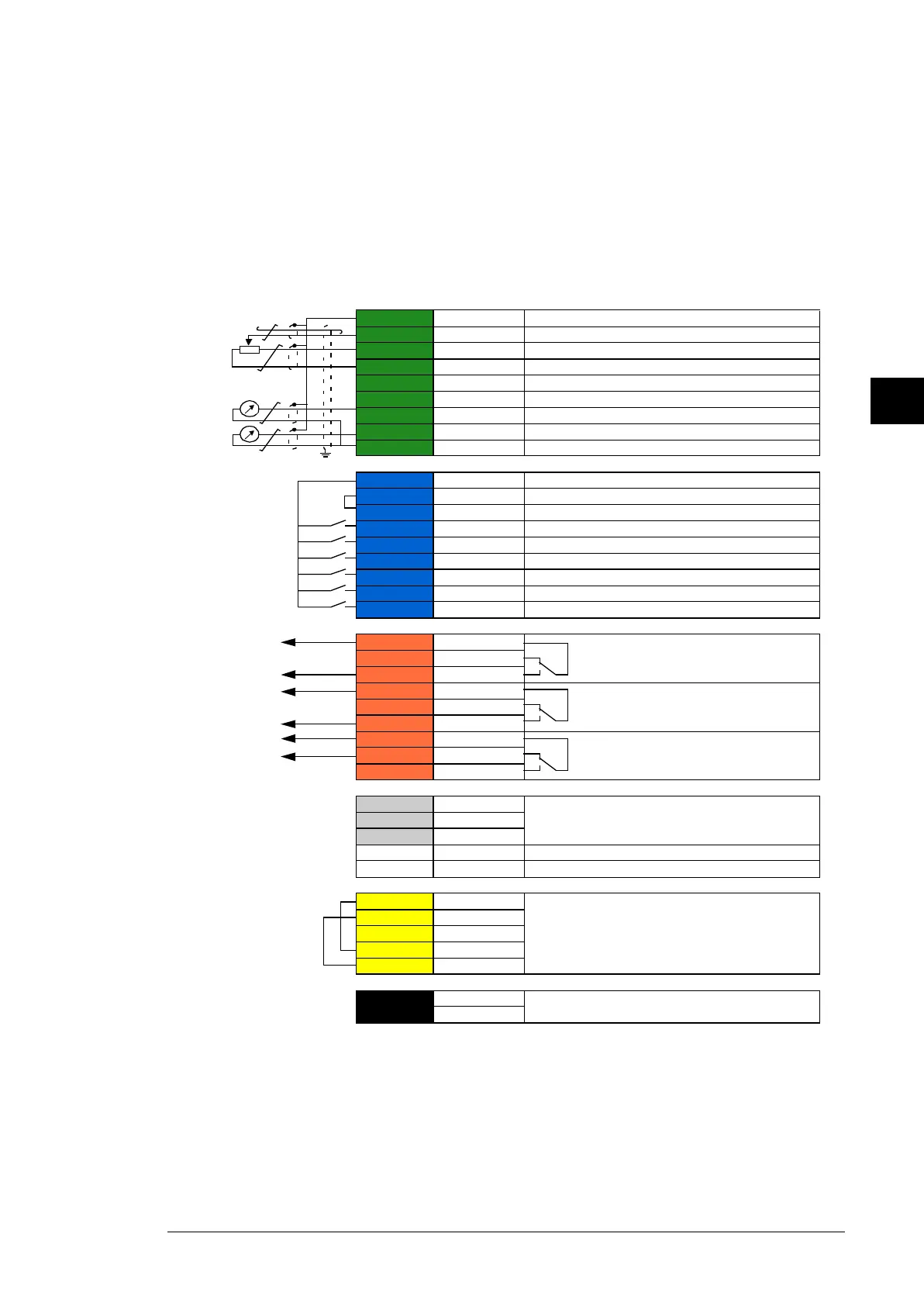
X1
1 SCR
Reference voltage and analog inputs and outputs
2 AI1
Signal cable shield (screen)
3 AGND
Output frequency/speed reference: 0…10 V
4 +10V
Analog input circuit common
5 AI2
Reference voltage 10 V DC
6 AGND
Actual feedback: 0…20 mA
7 AO1
Analog input circuit common
8 AO2
Output frequency: 0…10 V
9 AGND
Motor current: 0…20 mA
X2 & X3
Analog output circuit common
10 +24V
Aux. voltage output and programmable digital inputs
11 DGND
Aux. voltage output +24 V DC, max. 250 mA
12 DCOM
Aux. voltage output common
13 DI1
Digital input common for all
14 DI2
15
Not configured
DI3
Stop (0) / Start (1)
16 DI4
Constant frequency/speed selection
17 DI5
18
Not configured
DI6
Start interlock 1 (1 = allow start)
Not configured
19 RO1C
X6, X7, X8 Relay outputs
20 RO1A
21
RO1B
22
Damper control
250 V AC / 30 V DC
2 A
RO2C
23 RO2A
24
RO2B
25
Running
250 V AC / 30 V DC
2 A
RO3C
26 RO3A
27
X5
RO3B
Fault (-1)
250 V AC / 30 V DC
2 A
29 B+
Embedded fieldbus
30 A-
31 DGND
S4
Embedded fieldbus, EFB (EIA-485)
TERM
S5 BIAS
Termination switch
X4
34
Safe torque off
OUT1
Bias resistors switch
35 OUT2
36
SGND
37 IN1
38 IN2
X10
40
24 V AC/DC
24 V AC/DC+ in
Safe torque off. Factory connection. Both circuits
must be closed for the drive to start. See chapter
7KH Safe torque off function LQ WKH $&+
KDUGZDUHPDQXDO$;'>(QJOLVK@.
41
24 V AC/DC- in
Ext. 24V AC/DC input to power up the control unit
when the main supply is
disconnected.

 Loading...
Loading...





