PLC API
TS5055 33Version: 1.3
12 PLC API
In many plants workpieces undergo machining operations while being transported. For this purpose it is
necessary to synchronise the position and the speed of tool and workpiece, so that the tool can then be
applied as if to a stationary workpiece. One example of such an application is a saw that during the transport
process cuts through the material that is being transported (flying saw). In order to implement this kind of
application, TwinCAT provides the flying saw.
The TwinCAT PLC library TcMC2_FlyingSaw.lib, available as an additional product, provides easy
management of the flying saw. An example program using the flying saw [}44] makes use of this library.
Zur einfachen Handhabung der Fliegenden Säge dient die TwinCAT PLC Library TcMC2_FlyingSaw.lib, die
als zusätzliches Produkt erhältlich ist. Ein Beispielprogramm zum Thema Fliegende Säge [}44] verwendet
diese Bibliothek.
The following PLC function blocks are available for operation of the Universal Flying Saw.
Function Block
Synchronisation to velocity
MC_GearInVelo [}33]
Synchronisation to position
MC_GearInPos [}36]
Read the characteristic values
MC_ReadFlyingSawCharacteristics [}39]
Uncouple the slave
MC_GearOut [}40]
12.1 TcMC2_FlyingSaw
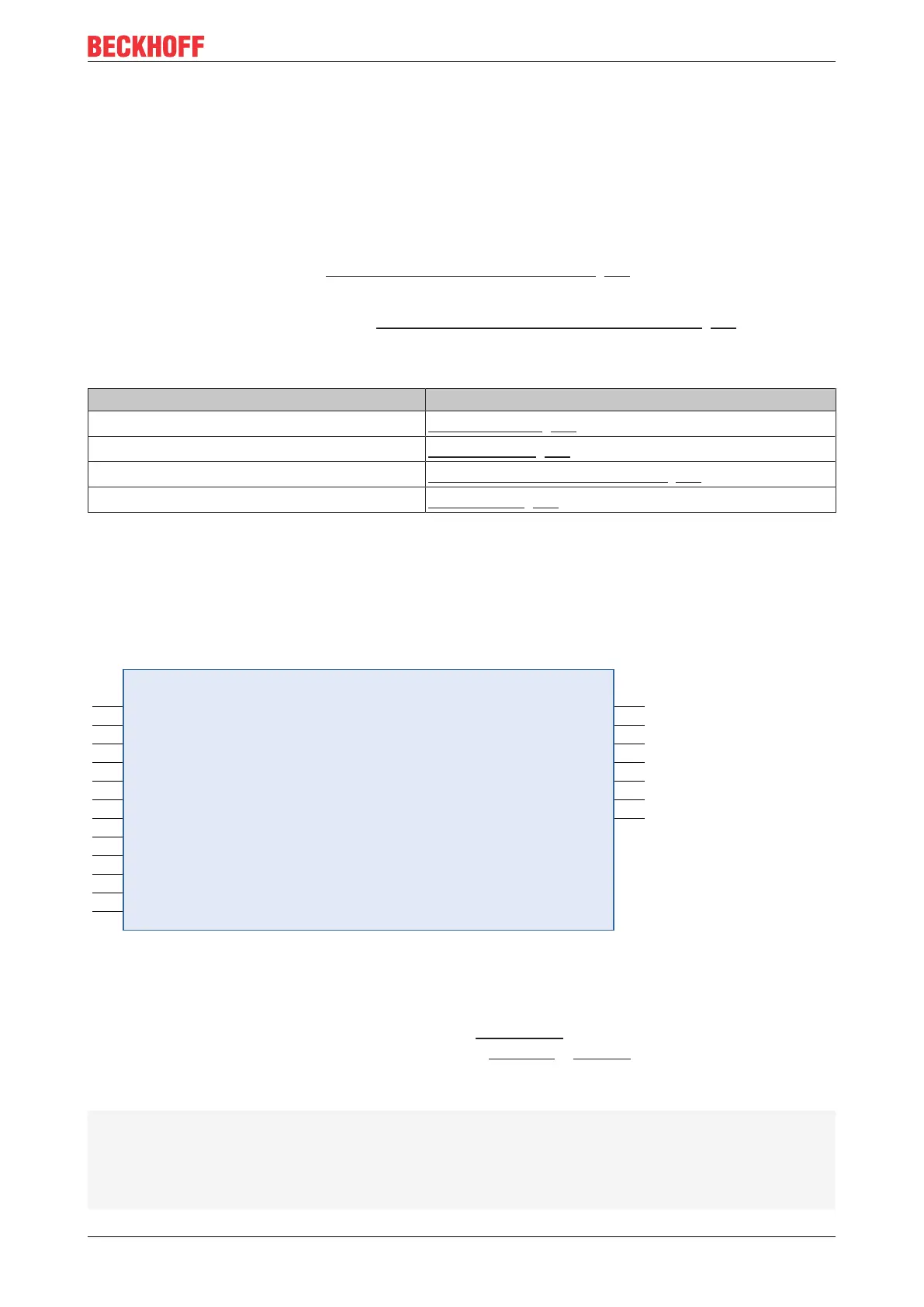
12.1.1 MC_GearInVelo
MC_GearInVelo
ExecuteBOOL
RatioNumeratorLREAL
RatioDenominatorUINT
SyncModeST_SyncMode
VelocityLREAL
AccelerationLREAL
DecelerationLREAL
JerkLREAL
BufferModeMC_BufferMode
OptionsST_GearInVeloOptions
↔
MasterReference To AXIS_REF
↔
SlaveReference To AXIS_REF
BOOLStartSync
BOOLInSync
BOOLBusy
BOOLActive
BOOLCommandAborted
BOOLError
UDINTErrorID
The function block MC_GearInVelo activates a linear master-slave coupling (gear coupling). If the master
axis is already moving, the slave axis synchronizes to the master velocity. The block accepts a fixed gear
ratio in numerator/denominator format.
The slave axis can be uncoupled with the function block MC_GearOut. If the slave is decoupled while it is
moving, then it retains its velocity and can be halted using MC_Stop or MC_Halt.
Inputs
VAR_INPUT
Execute:BOOL;
RatioNumerator:LREAL;
RatioDenominator:UINT;
SyncMode:ST_SyncMode;
Velocity:LREAL;
Acceleration:LREAL;
 Loading...
Loading...