VLT
®
5000 Series
Programming
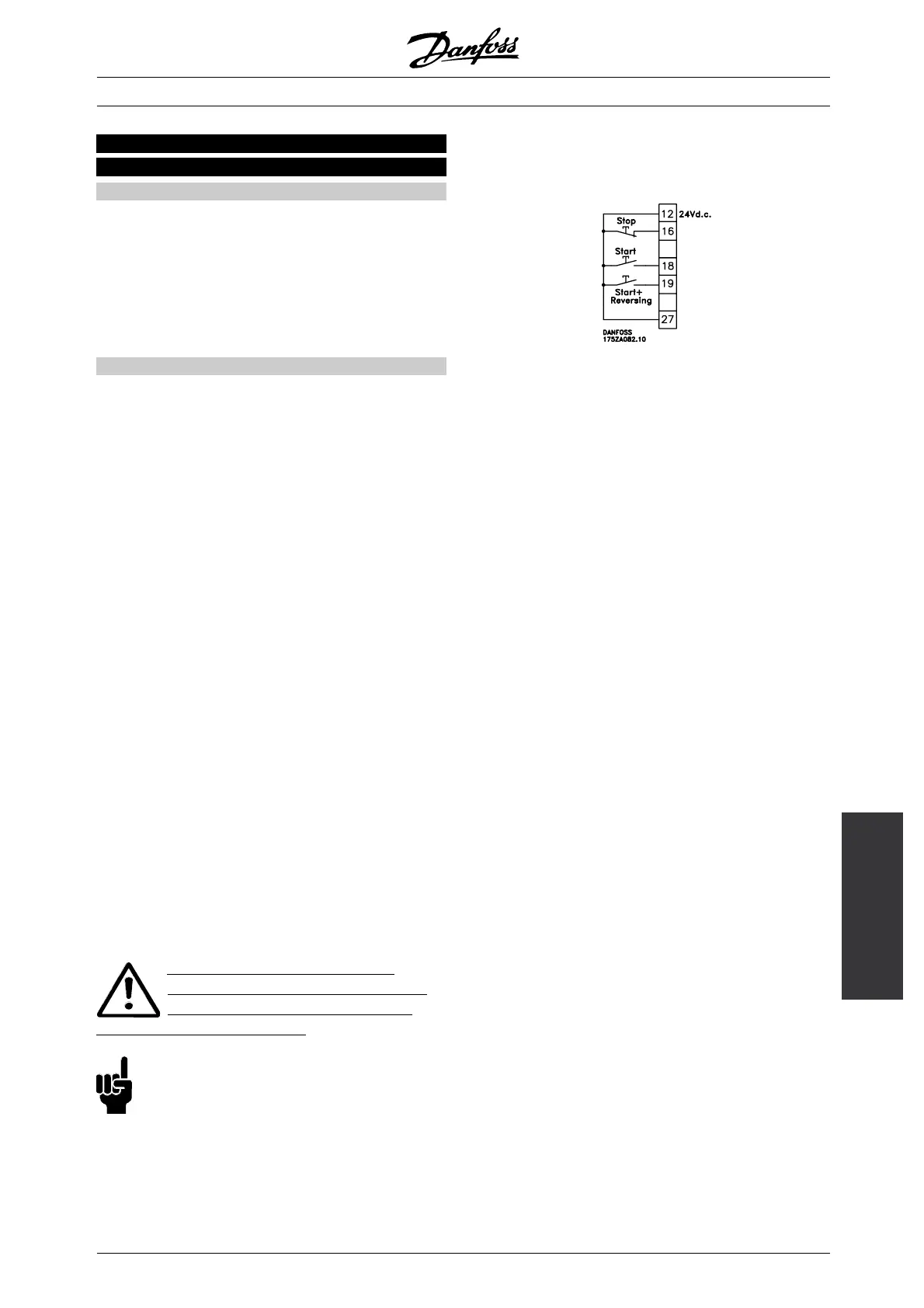
300 Terminal 16, input
(DIGITAL INPUT 16)
Function:
In this and the following parameters it is possible
to choose between the different possible functions
related to the inputs on terminals 16-33.
The function options are shown in the table on page
111. The maximum frequency for terminal 16, 17,
18 and 19 is 5 kHz. The maximum frequency for
terminals 29, 32 and 33 is 65 kHz.
Description of choice:
No function is selected if the frequency converter is
not to react to signals transmitted to the terminal.
Reset zeroes the frequency converter after an alarm;
however, not all alarms can be reset.
Coasting stop inverse is used for making the
frequency converter let go of the motor to make it coast
freely to stop. Logic ’0’ leads to coasting stop and reset.
Reset and coasting stop inverse,isusedfor
activating coasting stop at the same time as reset.
Logic ‘0’ leadstocoastingstopandreset
Quick-stop inverse is used for stopping the motor in
accordance with the quick-stop ramp (set in parameter
212). Logic ’0’ leads to a quick-stop.
DC braking inverse is used for stopping the
motor by energizing it with a DC voltage for a
given time, see parameters 125-127.
Please note that this function is only active if the
value of parameters 126-127 is different from 0.
Logic ’0’ leadstoDCbraking.
Stop inverse is activated by interrupting the voltage
to the terminal. This means that if the termin
al
has no voltage, the motor cannot run. The stop
will be effected in accordance with the selected
ramp (parameters 207/208/209/210).
None of the above-mentioned stop
commands (start-disable) are to be used
as disconnection switch in connection
with repairs. Cut mains instead.
NB!:
It must be noted that when the frequency
converter is at the torque limit and has received
a stop command, it will only
stop if terminal
42, 45, 01 or 04 has been connected to terminal
27. The data choice on terminal 42, 45, 01 or 04
must be Torque limit and s
top [27].
Start, is selected if a start/stop (operating
command, group 2) command is desired. Logic
’1’ = start, logic ’0’ =stop.
Latched start - if a pulse is applied for min. 3 ms,
the motor will start, provided no stop command
(operating command, group 2). The motor stops
if Stop inverse is activated briefly.
Reversing is used for changing the direction of
rotation of the motor shaft. Logic "0" will not lead
to reversing. Logic "1" will lead to reversing. The
reversing signal only changes the direction of rotation;
it does not activate the start function.
Reversing requires that Both directions has been
selected in parameter 200.
Is not active if Process control, closed loop,
Torque control open loop or Torque control, speed
feedback has been selected.
Start reversing, is used for start/stop (operating
command, group 2) and for reversing with the same
signal. No signal is allowed on terminal 18 at the
same time. Acts as latch start reversing, provided
latchstarthasbeenchosenforterminal18.
Is not active if Process control, closed loop
has been selected.
Start clockwise only, on is used if the motor shaft is
only to be able to rotate clockwise when starting.
Should not be used with Process control, closed loop.
Start anti-clockwise only , is used if the motor shaft
is to rotate anti-clockwise when started.
Should not be used with Process control, closed loop.
Jog is used for overriding the output frequency to the
jog frequency set in parameter 213. The ramp time
can be set in parameter 211. Jog is not active if a
stop command has been given (start-disable). Jog
overrides stop (operating command, group 2).
Preset reference, on is used for shifting between
external reference and preset reference. It is assumed
that External/preset [2] has been selected in parameter
214. Logic ’0’ = external references active; logic
’1’ = one of the four preset references is active
in accordance with the table below.
✭
= factory setting. () = display text [] = value for use in communication via serial communication port
MG.51.A9.02 - VLT is a registered Danfoss trademark
123
 Loading...
Loading...



