12
IP1854EN - 2013-03-01
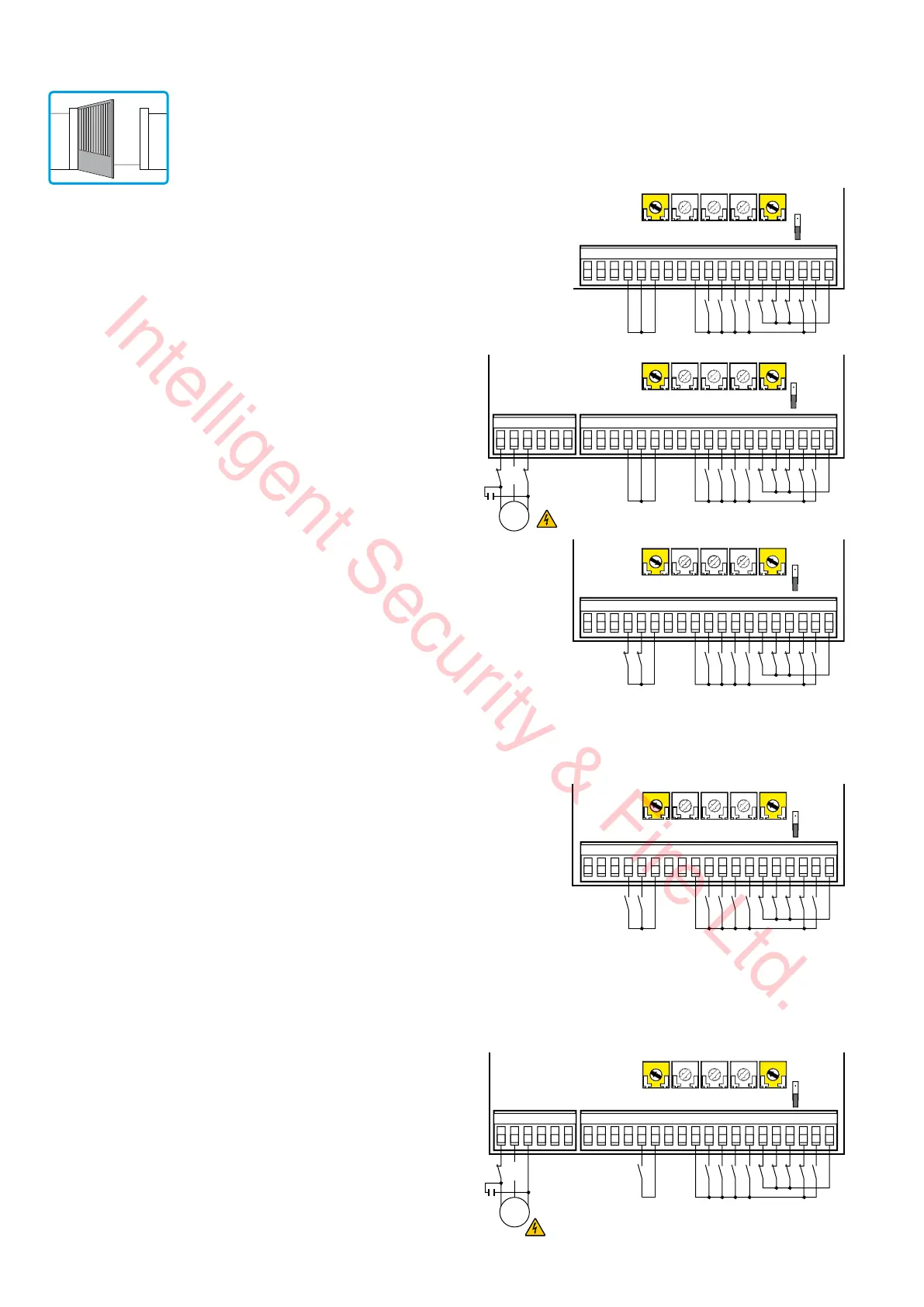
10. Example application for one-motor swing gate
When the LOGICM control panel is used in automation applications with one swinging door wing, one of the
following operating modes may be selected.
Example 1 - Door wing stops against mechanical end stops and in
the event of obstacle detection.
Set an operating time of 2-3 s longer than the effective time taken by
the door wing (TM<MAX) and bridge terminals 0-11-12 with jumpers.
In this configuration, the door wing will come to a stop against me-
chanical opening and closing end stops and in the event of obstacle
detection.
Example 2 - Door wing stops against limit switches and in the event
of obstacle detection.
The NC contacts of the opening and closing limit switches are con-
nected in series with the motor phases.
Set an operation time TM<MAX and bridge terminals 0-11-12 with
jumpers.
In this configuration, the door wing stops against the opening and
closing limit switches and in the event of obstacle detection.
Example 3 - Door wing stops against limit switches and reverses
motion in the event of obstacle detection.
Set an operating time TM=MAX and connect the opening and closing
limit switch NC contacts to terminals 0-11-12.
In this configuration, the door wing stops when the limit switches
are activated.
In the event of obstacle detection while opening, the door wing stops,
performing a disengagement operation, whereas during a closing
operation, the door wing reopens.
Example 4 - Door wing stops against mechanical end stops and re-
verses motion in the event of obstacle detection.
Set an operating time of 2-3 s longer than the effective time taken by
the door wing (TM<MAX) and position the proximity limit switches 2-3
s ahead of the mechanical end stop.
In this configuration, the door wing stops against its respective me-
chanical closing and opening end stop.
In the event of obstacle detection before the activation of the proximi-
ty limit switch while opening, the door wing stops, performing a di-
sengagement operation; after the proximity limit switch is activated,
the door wing stops against the obstacle.
In the event of obstacle detection during closing and before the acti-
vation of the proximity limit switch, the door wing reopens; after the
proximity limit switch is activated, the door wing stops against the
obstacle.
Example 5 - The door wing stops against the limit switch when ope-
ning and against the mechanical end stop when closing, and rever-
ses motion in the event of obstacle detection.
Set an operating time of 2-3 s longer than the effective time taken
by the door wing (TM<MAX), position the proximity limit switches 2-3
s ahead of the mechanical end stop and connect the opening limit
switch NC in series to the opening phase of the motor.
In this configuration, the door wing stops against the mechanical
end stop when closing, and when the relative limit switch is acti-
vated when opening. When an obstacle is detected during opening,
the door wing stops, performing a disengagement operation. In the
event of obstacle detection during closing and before the activation of
the proximity limit switch, the door wing reopens; after the proximity
limit switch is activated, the door wing stops against the obstacle.
TM TC RP TR R1
OM=OFF
15 14 13 12 11 00112345678920 41
TM TC RP TR R1
15 14 13 12 11 00112345678920 41UWVXZY
com
M1
1~
Limit switch (230 V 5A)
OM=OFF
TM TC RP TR R1
15 14 13 12 11 00112345678920 41
Closing limit switch
Opening limit switch
OM=OFF
TM TC RP TR R1
15 14 13 12 11 0011234567892041
Closing proximity switch
Opening proximity switch
OM=OFF
TM TC RP TR R1
15 14 13 12 11 00112345678920 41UWVXZY
com
M1
1~
Opening limit switch (230 V 5A)
Closing
proximity switch
OM=OFF
Intelligent Security & Fire Ltd.
 Loading...
Loading...



