7-17
7-5 Brake Interlock
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
7
Applied Functions
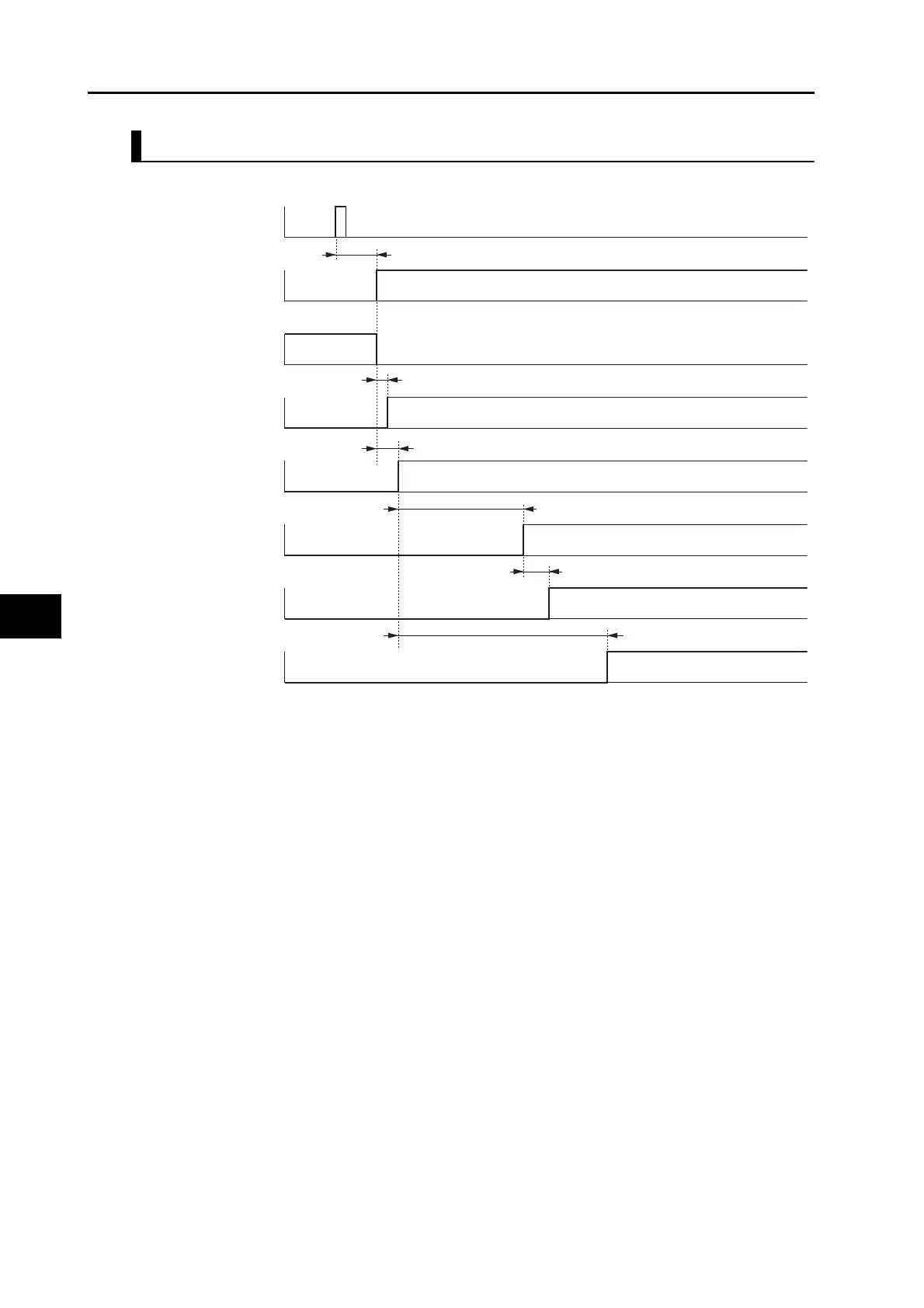
Operation Timing When Resetting Errors
*1. The servo does not turn ON until the motor rotation speed drops to approx. 30 r/min or below.
*2. The Brake Interlock Output (BKIR) signal is output either when a release request command is received via Servo
controls or when a release request command is received via EtherCAT communications. The above example shows
when there is no brake release request from EtherCAT communications. The BKIR signal is assigned to the general-
purpose output (CN1).
Note: After the error has been reset, the system enters the servo OFF state (motor not energized). To turn ON the
servo, send a servo ON command again after resetting the error, according to the above timing.
Error reset command
ON
OFF
16 ms or more
Error Output (/ALM)
Reset
OFF
ON
OFF
Servo ON/OFF
ON
OFF
ON
Brake Released
Brake Engaged
READY
ON
OFF
Approx. 60 ms
Brake interlock
output (BKIR)
*2
Error Normal
OFF
Power supply
ON
OFF
ON
OFF
No power supply
Servo ready
output (READY)
Dynamic brake relay
Motor power supply
ON
Operation command input
Servo OFF
Input prohibited Input allowed
Servo ON
*1
Release request
Brake held
0 ms or more
2 ms or more
4 ms
100 ms or more
 Loading...
Loading...
