9-8
9-2 Gain Settings
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
9
Details on Servo Parameter Objects
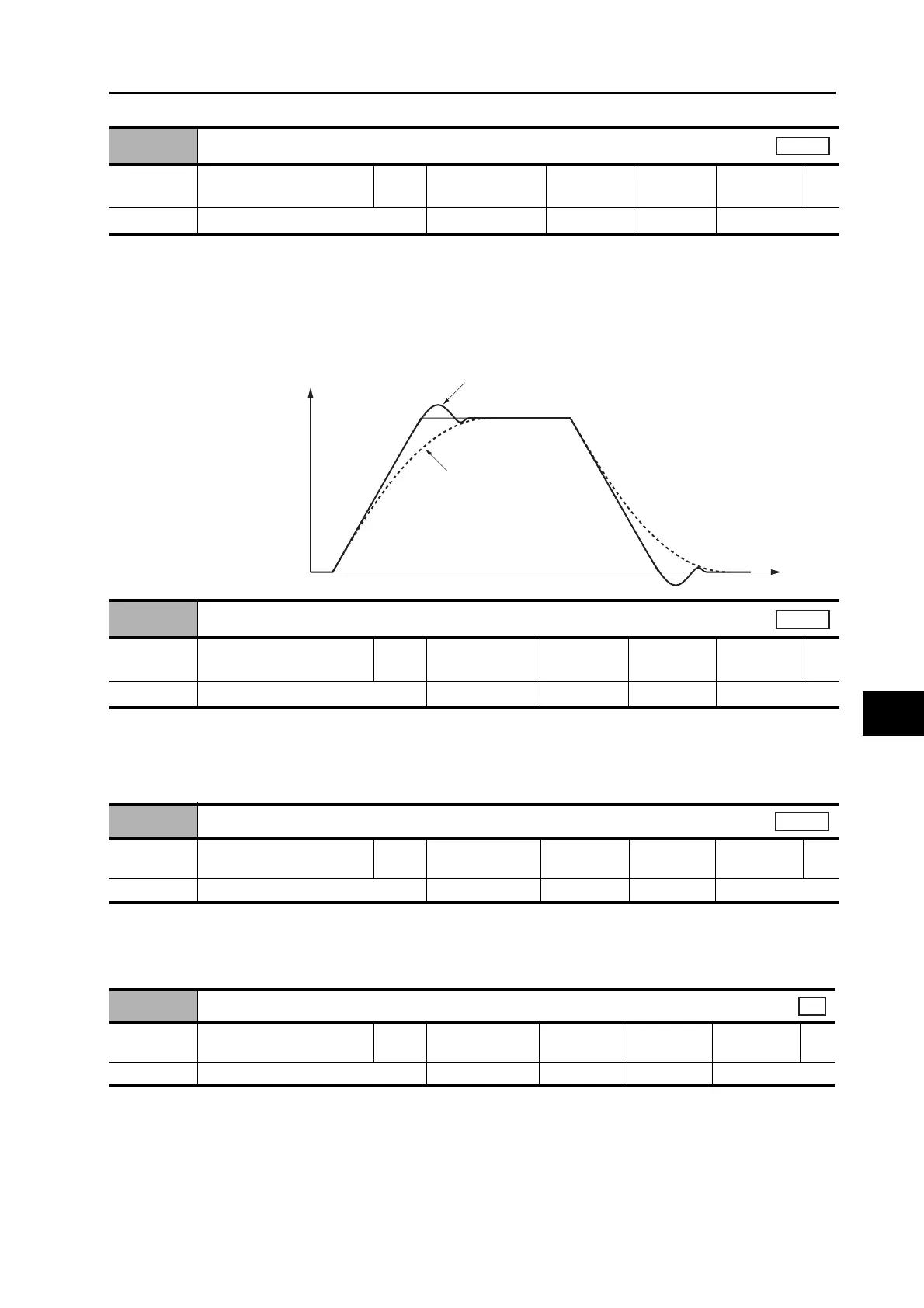
Set the speed loop integral time constant.
The smaller the set value, the faster the error approaches 0 when stopping.
When the speed loop integral time constant is changed, the response is as shown in the
following diagram.
Set the time constant for the low pass filter (LPF) after speed detection to one of 6 levels (0 to 5).
Increasing the set value increases the time constant and decreases the noise generated by the
motor. Responsiveness, however, also decreases.
Normally, use the default set value.
Set the time constant for the first-order lag filter inserted into the torque command.
This object may be effective in suppressing vibration due to torsion resonance.
Set the responsiveness of the position control system for the second position loop.
3102 hex
Speed Loop Integral Time Constant 1
Setting
range
1 to 10000 Unit 0.1 ms
Default
setting
210
*1
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
*1. The default setting is 310 for a Drive with 200 V and 1 kW or greater, or with 400 V.
All
Motor speed
Time
Overshooting occurs if the speed loop integral
time constant is small.
Speed loop integral
time constant is large.
3103 hex
Speed Feedback Filter Time Constant 1
Setting
range
0 to 5 Unit −
Default
setting
0
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
All
3104 hex
Torque Command Filter Time Constant 1
Setting
range
0 to 2500 Unit 0.01 ms
Default
setting
84
*1
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
*1. The default setting is 126 for a Drive with 200 V and 1 kW or greater, or with 400 V.
All
3105 hex
Position Loop Gain 2
Setting
range
0 to 30000 Unit 0.1/s
Default
setting
570
*1
*1. The default setting is 380 for a Drive with 200 V and 1 kW or greater, or with 400 V.
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
csp
 Loading...
Loading...
