E6581169
- 3 -
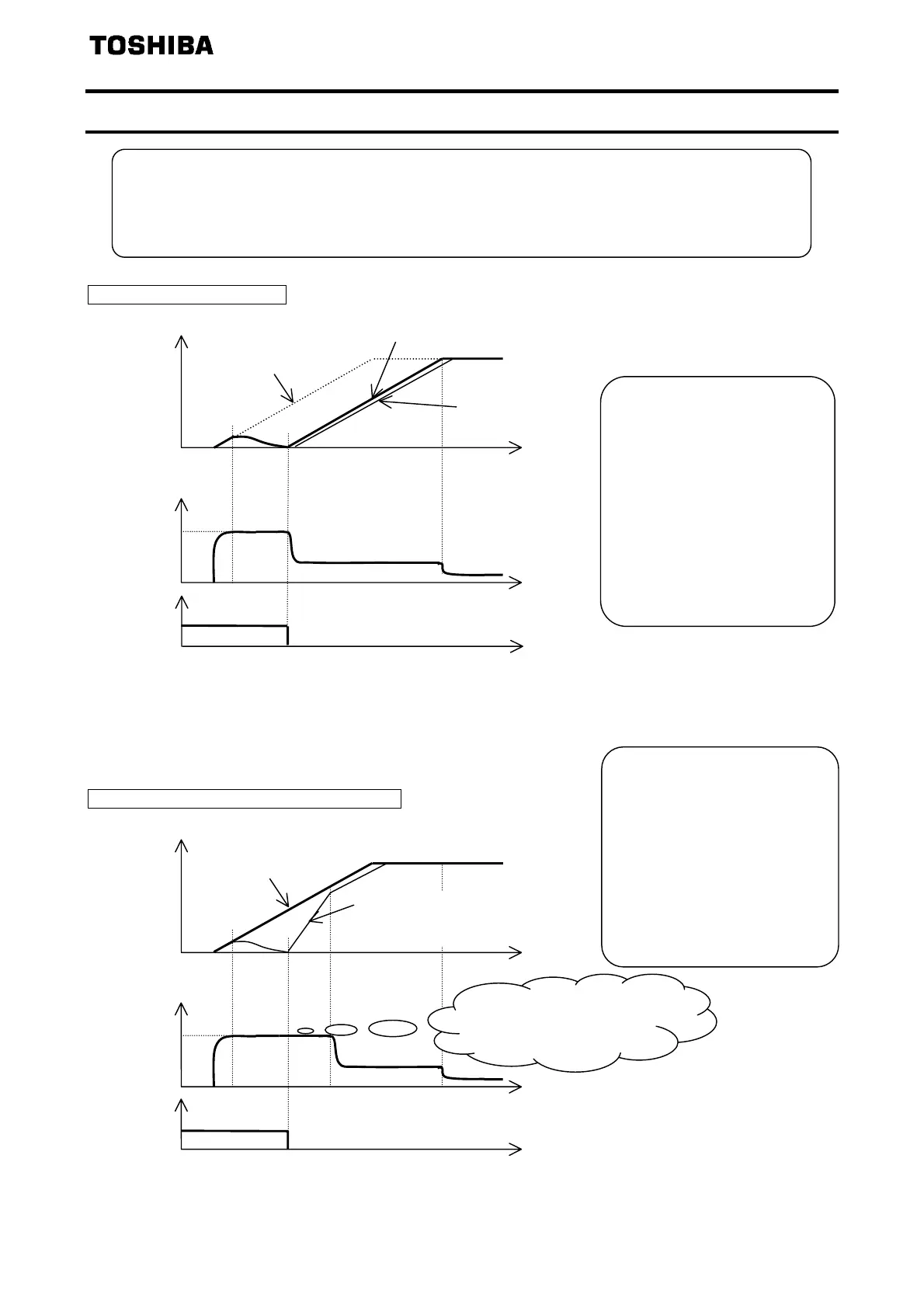
4. Function of parameter H
H
= 0 mode (standard)
H
= 1 mode (without speed cooperation)
Operation frequency is controlled
when torque limit is activated.
Therefore, actual speed is
controlled to follow the operation
frequency always.
Since the operation frequency is
raised after torque declines with
release of the mechanical brake,
the time that the actual speed
corresponds to the operation
frequency is time lag in
mechanical brake operation +
acceleration time.
When the inverter is used in combination with the mechanical brake of a lifting machine (crane, hoist,
etc.), the load fall by torque reduction can be prevented by carrying out the shortest acceleration of the
mechanical brake operation delay time.
Moreover, this parameter raises response in inching operation in order to control the load not to slip
down.
Frequency [Hz]
Time [s]
Torque [N⋅m]
Time [s]
Torque limit
level
ctual speed
When torque limit is
not activated
Operation frequency
Time [s]
Mechanical
brake
ON
OFF
(Released)
Operation frequency becomes
high ahead of torque limit even
when it is activated.
When torque declines with release
of the mechanical brake, it is
sustained at the limit level and
actual speed is controlled to follow
the operation frequency.
This mode functions not only to
prevent the load from falling but to
raise response in inching
operation.
Frequency [Hz]
Torque [N⋅m]
Time [s]
Torque limit
level
ctual speed
(Acceleration rate is determined
by torque limit.)
Operation frequency
Time [s]
Time [s]
Mechanical
brake
ON
OFF
(Released)
Torque limit is sustained after
the mechanical brake is
released.
 Loading...
Loading...










