YORK INTERNATIONAL
6
AUTOMATIC SPEED CONTROL
The Micro Board controls the VSOP drive output fre-
quency by applying a Pulse Width Modulation (PWM)
speed command signal to the VSOP drive (ref Fig. 2).
The signal is applied every 0.7 seconds. Within the 0.7
second period, the duration of time that the signal is
“low” (0VDC) , determines the VSD output frequency
between 25 to 60Hz. If the signal remains “high”
(+12VDC) for the entire 0.7 second period, it is com-
manding the VSOP drive’s output frequency to 25Hz.
If the signal is low for the entire 0.7 second period, it is
commanding the VSOP drive’s output frequency to
60Hz. Frequencies between these extremes are
achieved by driving the signal low for a proportionate
amount of time within the 0.7 second period. For ex-
ample, if the signal is low for 50% (0.35 seconds) of the
0.7 second period, it would be commanding the VSOP
drive to operate at a frequency that is halfway between
25 and 60Hz, or 42.5Hz. The resolution, or smallest in-
crement of change, is 0.01 seconds. This allows the
output frequency to be changed in 0.5 Hz steps. The
formula provided in Figure 2 can be used to calculate
the output frequency for a given PWM signal.
The entire VSOP drive run time is divided into “Oil
Pressure Control Periods”. They run consecutively
and continuously; when the first one ends, the next one
begins. This repeats until the oil pump is shut down.
The duration of the periods are determined by the “OIL
PRS CTRL PERIOD SETPOINT”, programmed by
the Service Technician using instructions under “Pro-
gramming”. This setpoint is programmed in multiples
of 0.3 seconds over the range of 0.3 to 2.7 seconds, by
programming a “MULTIPLIER” value of 1 through 9.
The program multiplies this value by 0.3 to produce pe-
riods over the range of 0.3 to 2.7 seconds. This multi-
plier value also determines the magnitude of output fre-
quency correction when the error between the actual
oil pressure and the oil pressure setpoint is > ± 6 PSID).
The programmed value (1 through 9) is multiplied by
0.5Hz to provide greater frequency change to more
quickly correct the oil pressure. If the error is > ±0.5
PSID & <± 6 PSID, the output frequency is increased
or decreased 0.5Hz. At the end of each period, the ac-
tual oil pressure is compared to the programmed Oil
Pressure Setpoint and the Micro Board changes the
speed command as required per the following:
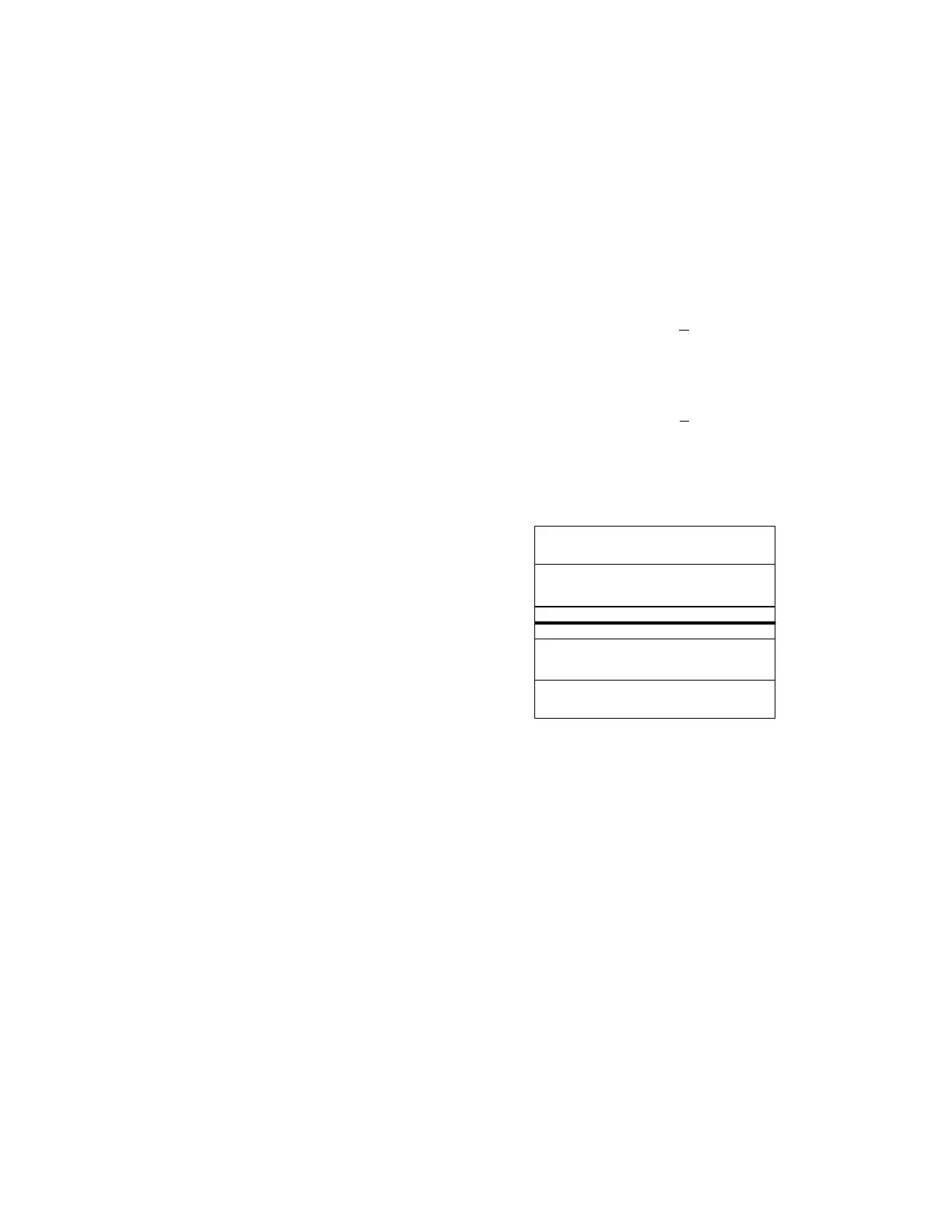
If actual oil pressure is:
a. >(setpoint + 0.5 PSID) &
<(setpoint + 6 PSID),
decrease output frequency 0.5Hz.
b. >(setpoint + 6 PSID), decrease output frequency
0.5Hz x Control Period Multiplier.
c. <(setpoint – 0.5 PSID) &
>(setpoint – 6 PSID),
increase output frequency 0.5Hz.
d. <(setpoint – 6 PSID), increase output frequency
0.5Hz x Control Period multiplier.
- 6 PSID
- .5 PSID
+ .5 PSID
+ 6 PSID
OIL PRESSURE
SETPOINT
CONDITION 'B' DECREASE OUTPUT FREQUENCY
0.5HZ x CONTROL PERIOD MULTIPLER
CONDITION 'A' DECREASE OUTPUT FREQUENCY
0.5HZ
NO CHANGE IN OUTPUT FREQUENCY
NO CHANGE IN OUTPUT FREQUENCY
CONDITION 'C' INCREASE OUTPUT FREQUENCY
0.5HZ
CONDITION 'D' INCREASE OUTPUT FREQUENCY
0.5HZ x CONTROL PERIOD MULTIPLER
VSOP DRIVE OUTPUT FREQUENCY CONTROL
ACTUAL OIL
PRESSURE
Since this EPROM version can be used on chillers that
are equipped with the VSOP drive and those that are
not, VSOP drive control must be enabled or disabled, as
appropriate, and the associated setpoints programmed
using the “Programming” procedure on page 8.
LD04651