Technical specification
Product Specification IRB 4400 M98A/BaseWare OS 3.2 51
3.11 Communication
The robot has two serial channels - one RS232 and one RS422 Full duplex - which
can be used to communicate point to point with printers, terminals, computers and
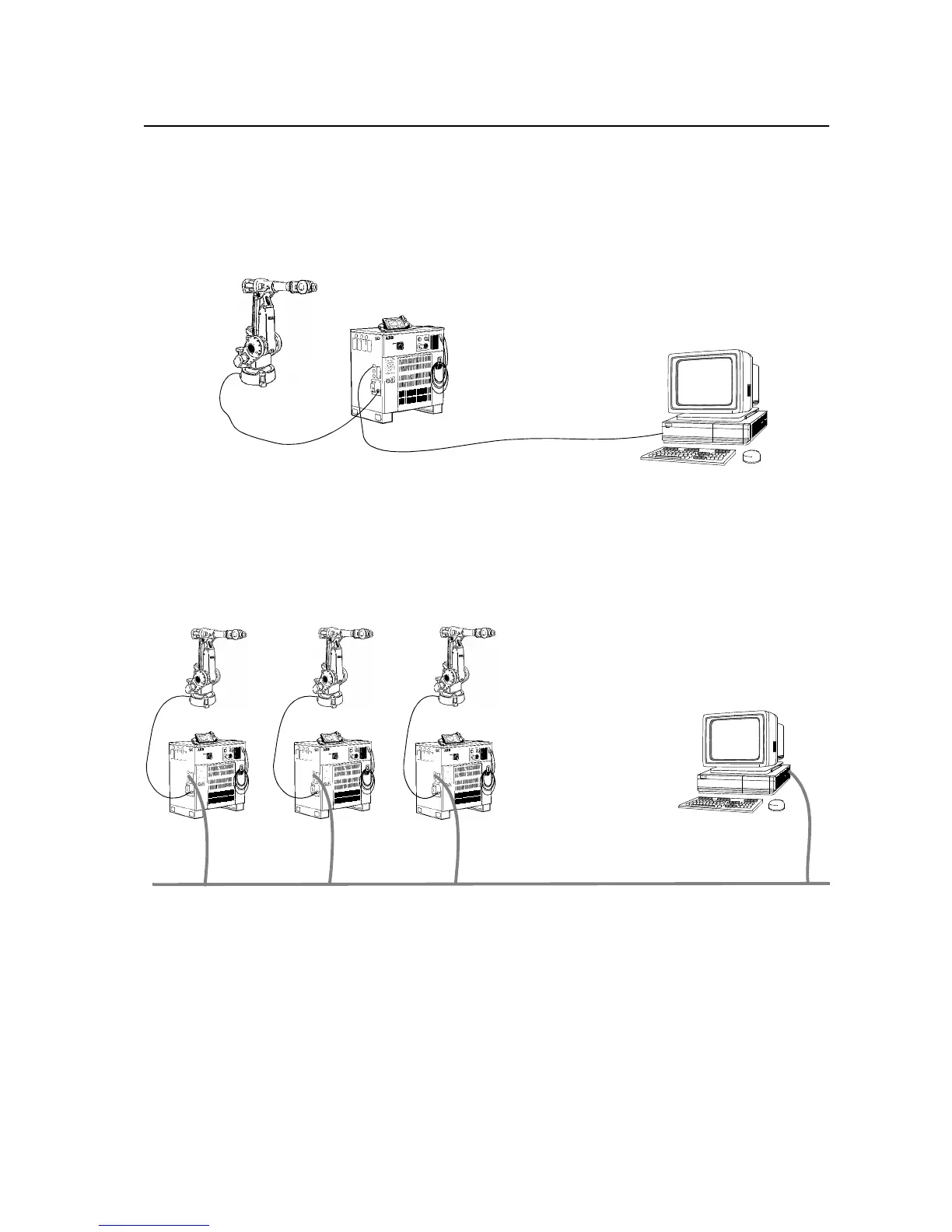
other equipment (see Figure 31).
Figure 31 Serial point-to-point communication.
The serial channels can be used at speeds of 300 to 19200 bit/s (max. 1 channel with
speed 19200 bit/s).
For high speed and/or network communication, the robot can be equipped with an
Ethernet interface (see Figure 32). Transmission rate is 10 Mbit/s.
Figure 32 Serial network communication.
Character-based or binary information can be transferred using RAPID instructions.
This requires the option Advanced functions, see Product Specification RobotWare.
In addition to the physical channels, a Robot Application Protocol (RAP) can be used.
This requires either of the options FactoryWare Interface or RAP Communication, see
Product Specification RobotWare.
 Loading...
Loading...







