VLT
®
5000 Series
Programming
made automatically, including the stator resistance
R
S
. A manually entered R
S
must apply to a cold
motor. The shaft performance can be improved by
fine-tuning R
S
and X
S
, see procedure below.
Description of choice:
R
S
can be set as follows:
1. Automatic motor adaptation, where the frequency
converter measures on the motor to determine the
value. All compensations are reset to 100%.
2. The values are stated by the motor supplier.
3. The values are obtained by means of
manual measurements:
-R
S
can be calculated by measuring the
resistance R
PHASE-to-PHASE
between two phase
terminals. If R
PHASE-to-PHASE
is lower than 1-2 ohm
(typically motors >4-5.5 kW, 400 V), a special
ohm-meter should be used (Thomson bridge or
similar). R
S
=0.5xR
PHASE-to-PHASE
4. The factory settings of R
S
, selected by the
frequency converter itself on the basis of the
motor nameplate data, are used.
NB!:
If the setting in parameter 102-109 is changed,
the parameters 110-118 will return to factory
setting. If using special motor characteristics a
change in parameter 102-109 affects parameter 422.
109 Stator reactance
(STATOR REACT.)
Value:
✭depends on the choice of motor
Function:
After setting motor data in parameters 102-106, a
number of adjustments of various parameters are
made automatically, including the stator reactance
X
S
. The shaft performance can be improved by
fine-tuning R
S
and X
S
, see procedure below.
Description of choice:
X
S
can be set as follows:
1. Automatic motor adaptation, where the frequency
converter measures on the motor to determine the
value. All compensations are reset to 100%.
2. The values are stated by the motor supplier.
3. These values are obtained by means of
manual measurements:
-X
S
can be calculated by connecting a motor to
mains and measuring the phase-to-phase voltage
U
L
as well as the idling current I.
Alternatively, these values can be recorded
during operation in idle running state at the
rated motor frequency f
M,N
, slip compensation
(par. 115) = 0% and load compensation at
high speed (par. 114) = 100%.
4. The factory settings of X
S
, selected by the
frequency converter itself on the basis of the
motor nameplate data, are used.
NB!:
If the setting in parameter 102-109 is changed,
the parameters 110-118 will return to factory
setting. If using special motor characteristics a
change in parameter 102-109 affects parameter 422.
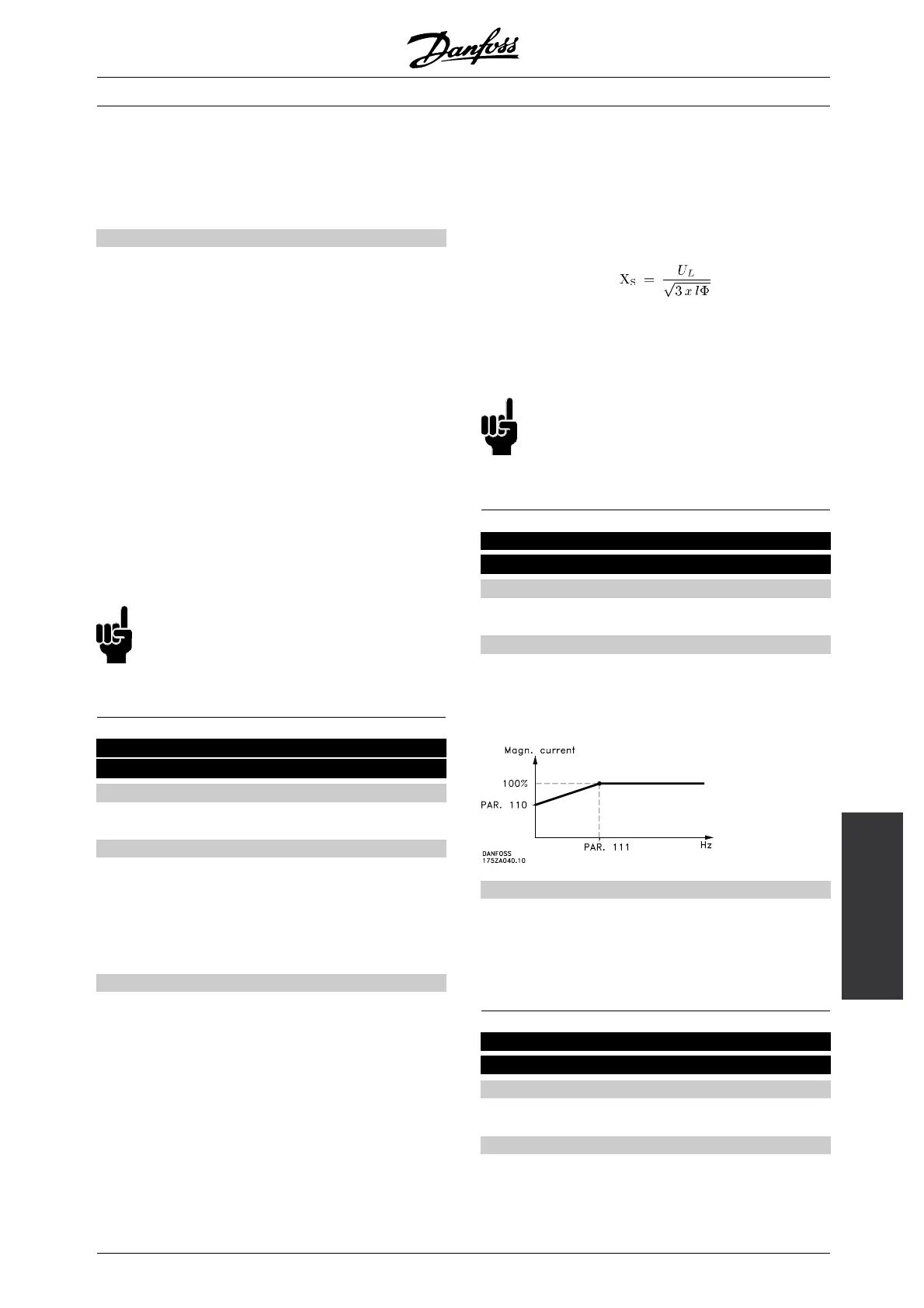
110 Motor magnetizing, 0 rpm
(MOT. MAGNETIZING)
Value:
0-300%
✭ 100 %
Function:
This parameter can be used if a different thermal load
on the motor is desired when running at low speed.
Thisparameterisusedinconnectionwith
parameter 111.
Description of choice:
Enter a value stated as a percentage of the
rated magnetizing current.
Too low setting may lead to a reduced torque
on the motor shaft.
111 Min. frequency normal magnetizing
(MIN FR NORM MAGN)
Value:
0.1 - 10.0 Hz
✭ 1.0 Hz
Function:
This parameter is used in connection with parameter
110. See drawing in parameter 110.
✭
= factory setting. () = display text [] = value for use in communication via serial communication port
MG.51.A9.02 - VLT is a registered Danfoss trademark
107
 Loading...
Loading...



