10.6 Application Example
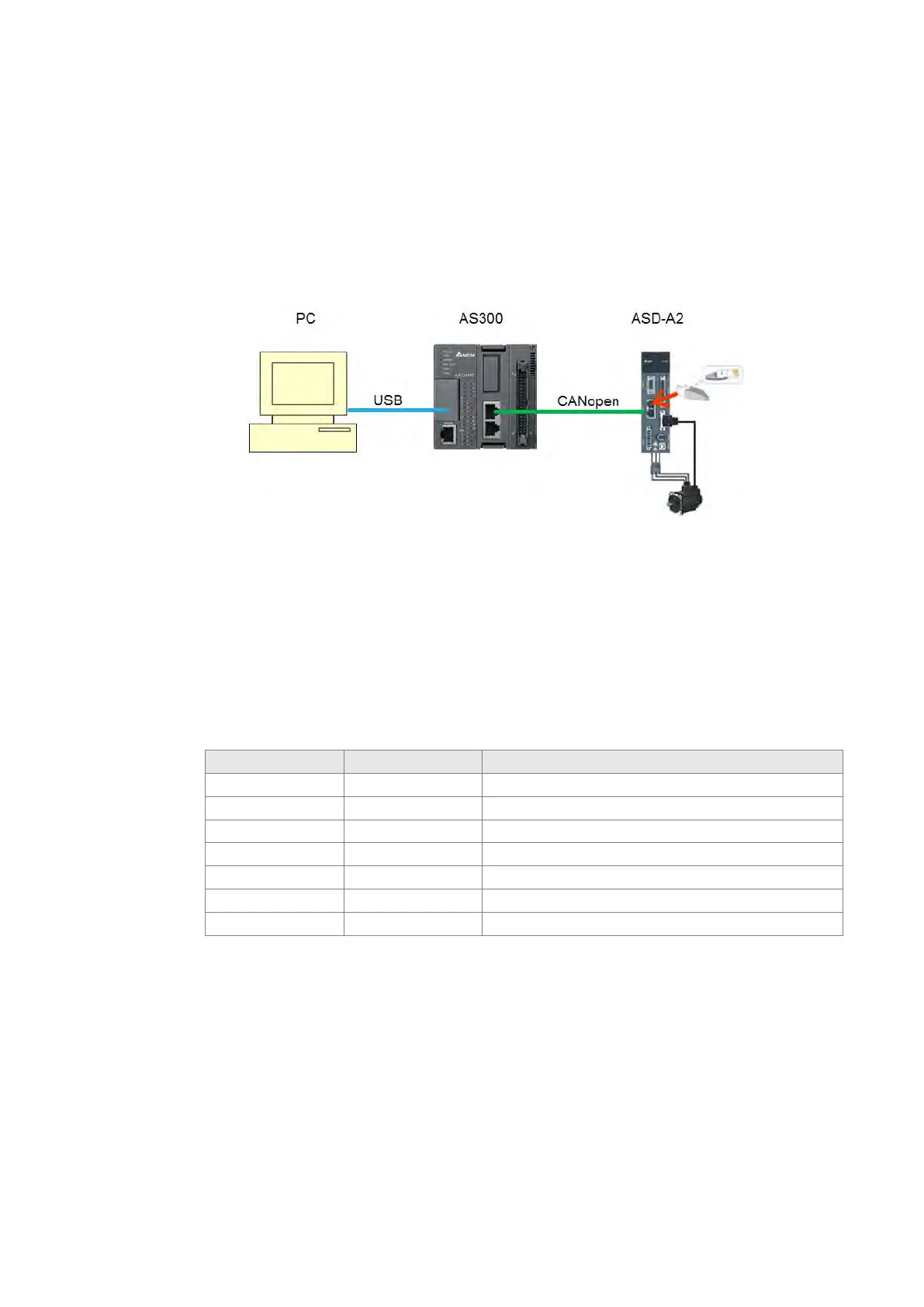
The AS300 Series PLC can control Delta A2 servo rotation, and monitor the actual rotation speed of the motor
in real time. It does this by mapping the relevant servo drive parameters to the corresponding PDO, and reads
or writes the relevant servo drive parameters through the CAN bus.
1. Connectting the Hardware
Note:
Use a standard communication cable such as UC-DN01Z-01A / UC-DN01Z-02A / UC-CMC010-01A.
and connect the terminal resistors (Delta standard terminal resistor TAP-TR01) to both ends of the
network when you construct the network.
M of ASD-A2-xxxx-M refers to the model code and currently only the M-model servo supports
CANopen communication.
2. Setting Servo Parameters:
Set servo parameters as shown in the following table.
Node ID of the A2 servo is 2
CAN communication rate is 1Mbps.
Drive displays the motor rotation speed (r/min)
Set DI1 as the signal for Servo On
Set DI3 as the signal _SPD0 for speed selection
Set DI4 as the signal _SPD1 for speed selection
3. Setting the CANopen Baud Rate and Node ID of AS300 Series PLC
The AS300 Series PLC uses the default setting values: Node ID: 1 and baud rate: 1Mbps.
You set the CANopen Node ID and baud rate for the AS300 series PLC in the CANopen Builder
software, as shown in the following steps.
Send Quote Requests to info@automatedpt.com
Call +1(800)985-6929 To Order or Order Online At Deltaacdrives.com
Send Quote Requests to info@automatedpt.com
Call +1(800)985-6929 To Order or Order Online At Deltaacdrives.com
 Loading...
Loading...