6-32
6-8 Torque Limit
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
6
Applied Functions
6-8 Torque Limit
Outline of Operation
The output torque by the Servomotor can be limited.
This function is used in the following conditions.
- When push-motion operation, such as pressing, is performed.
- When the torque at startup and during deceleration should be suppressed to protect the
mechanical system, etc.
Various methods are available according to Torque Control Selection (Pn521).
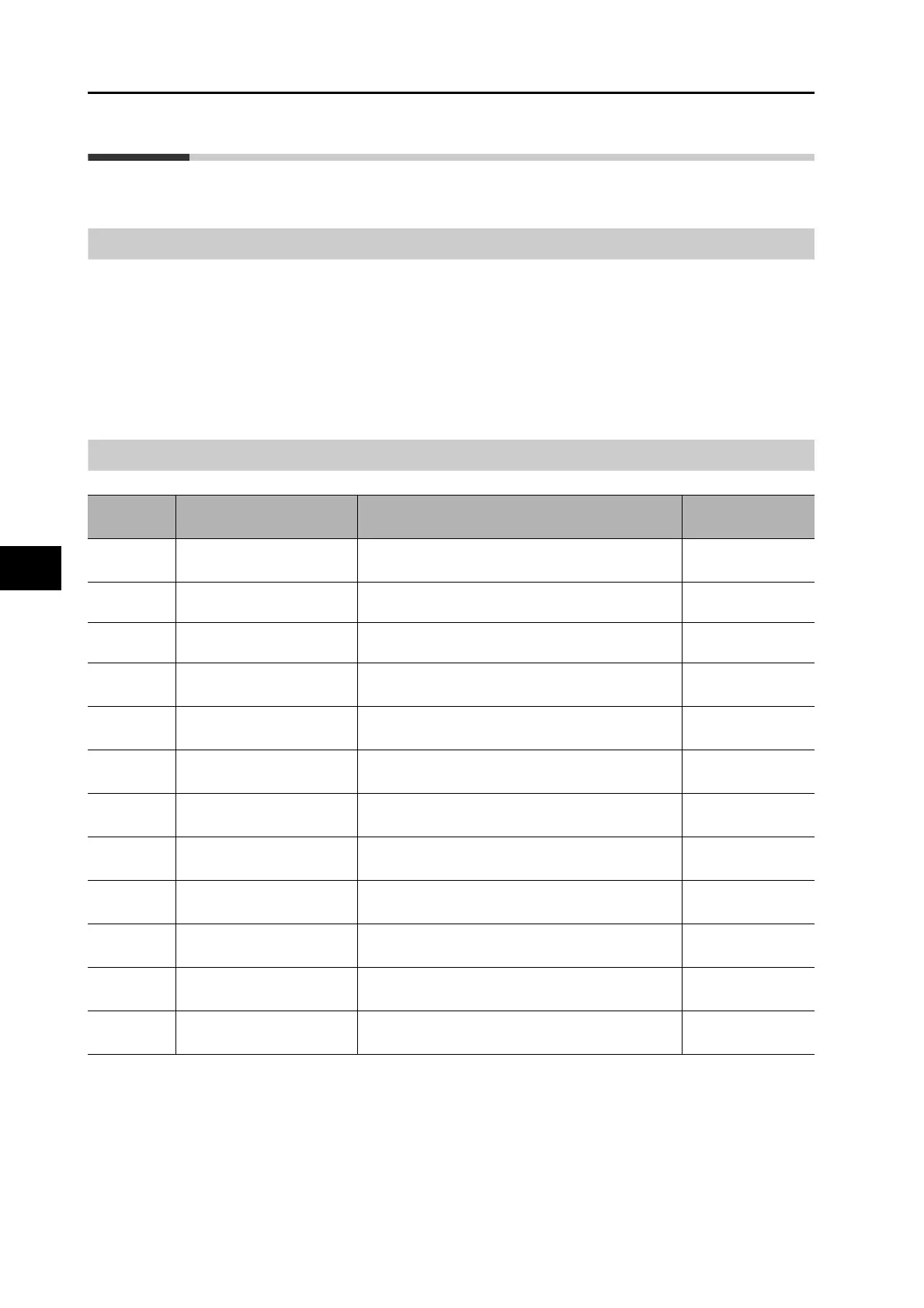
Parameters Requiring Settings
Parameter
number
Parameter name Explanation Reference
Pn521 Torque Limit Selection
Select the torque limit based on the various
parameters and input signals.
P.8-56
Pn013 No. 1 Torque Limit Set the No. 1 motor output torque limit value. P.8-7
Pn522 No. 2 Torque Limit Set the No. 2 motor output torque limit value. P.8-56
Pn523
Torque Limit Switching
Setting 1
Set the rate of change (fluctuate) when switching
from the No. 1 torque limit to No. 2 torque limit.
P.8-57
Pn524
Torque Limit Switching
Setting 2
Set the rate of change (fluctuate) when switching
from the No. 2 torque limit to No. 1 torque limit.
P.8-57
Pn525
Forward External Torque
Limit
Set the forward torque limit for a network signal. P.8-57
Pn526
Reverse External Torque
Limit
Set the reverse torque limit for a network signal. P.8-57
Pn527 Analog Torque Limit Scale
Set the gain for conversion for the analog torque
limit input.
P.8-57
Pn425 Analog Input 2 Offset
Set the offset adjustment value for the voltage
applied to analog input 2.
P.8-41
Pn426
Analog Input 2 Filter Time
Constant
Set the time constant of the first-order lag filter for
the voltage applied to analog input 2.
P.8-41
Pn428 Analog Input 3 Offset
Set the offset adjustment value for the voltage
applied to analog input 3.
P.8-42
Pn429
Analog Input 3 Filter Time
Constant
Set the time constant of the first-order lag filter for
the voltage applied to analog input 3.
P.8-42
 Loading...
Loading...
