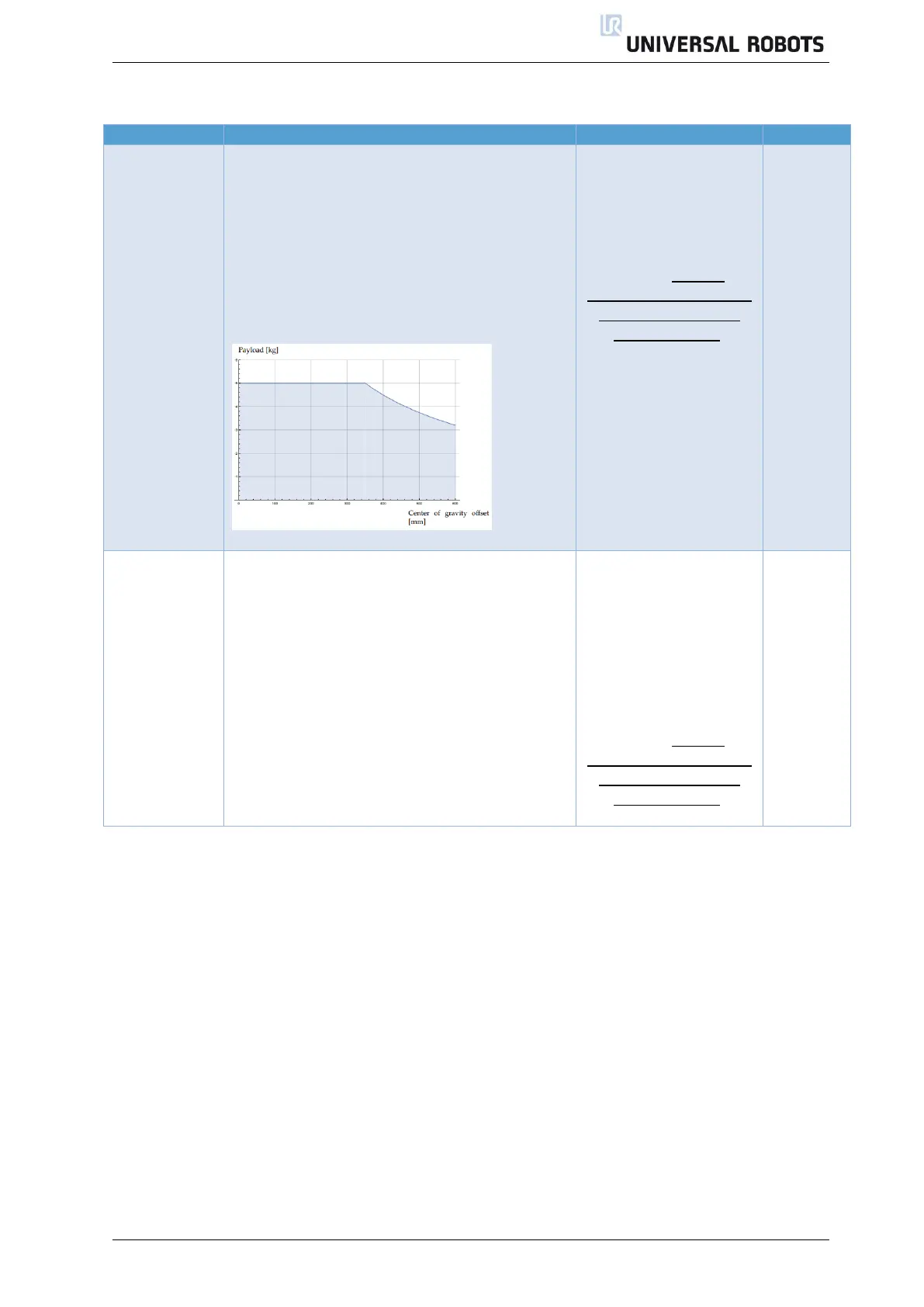
Payload and Center of Gravity must be set
correctly. The maximum allowed payload of
the robot arm depends on the center of
gravity offset. The center of gravity offset is
defined as the distance between the center
of the tool output flange and the center of
gravity of the total payload (tool +
workpiece).
Example for UR5 – CB3
The Payload and Center of Gravity must be
always adjusted when a workpiece is picked
up or dropped off.
The script command from the Script Manual
can be used for this purpose.
"set_payload(m, cog)"

 Loading...
Loading...









