Do you have a question about the Beckhoff CX5130 and is the answer not in the manual?
| Cores | 4 |
|---|---|
| Ethernet Ports | 2 |
| Power Supply | 24 V DC |
| Protection Class | IP20 |
| RAM | 2 GB |
| Operating System | Windows Embedded Standard 7 |
| USB Ports | 2 |
| Operating Temperature | -25 °C to 60 °C |
| Dimensions (W x H x D) | 100 mm x 100 mm x 75 mm |
Crucial safety regulations, liability exclusion, and personnel qualifications.
Introduces the built-in capacitive one-second UPS and its data-saving function.
Details the TcSUPS library, function blocks, and functions for UPS control.
Explains DIN rail mounting and correct installation positions for ventilation.
Details power supply requirements and connection for the CX51x0 system.
Provides guidance on accessing and modifying BIOS settings, emphasizing trained personnel.
Explains how to configure EtherCAT cable redundancy for network reliability.
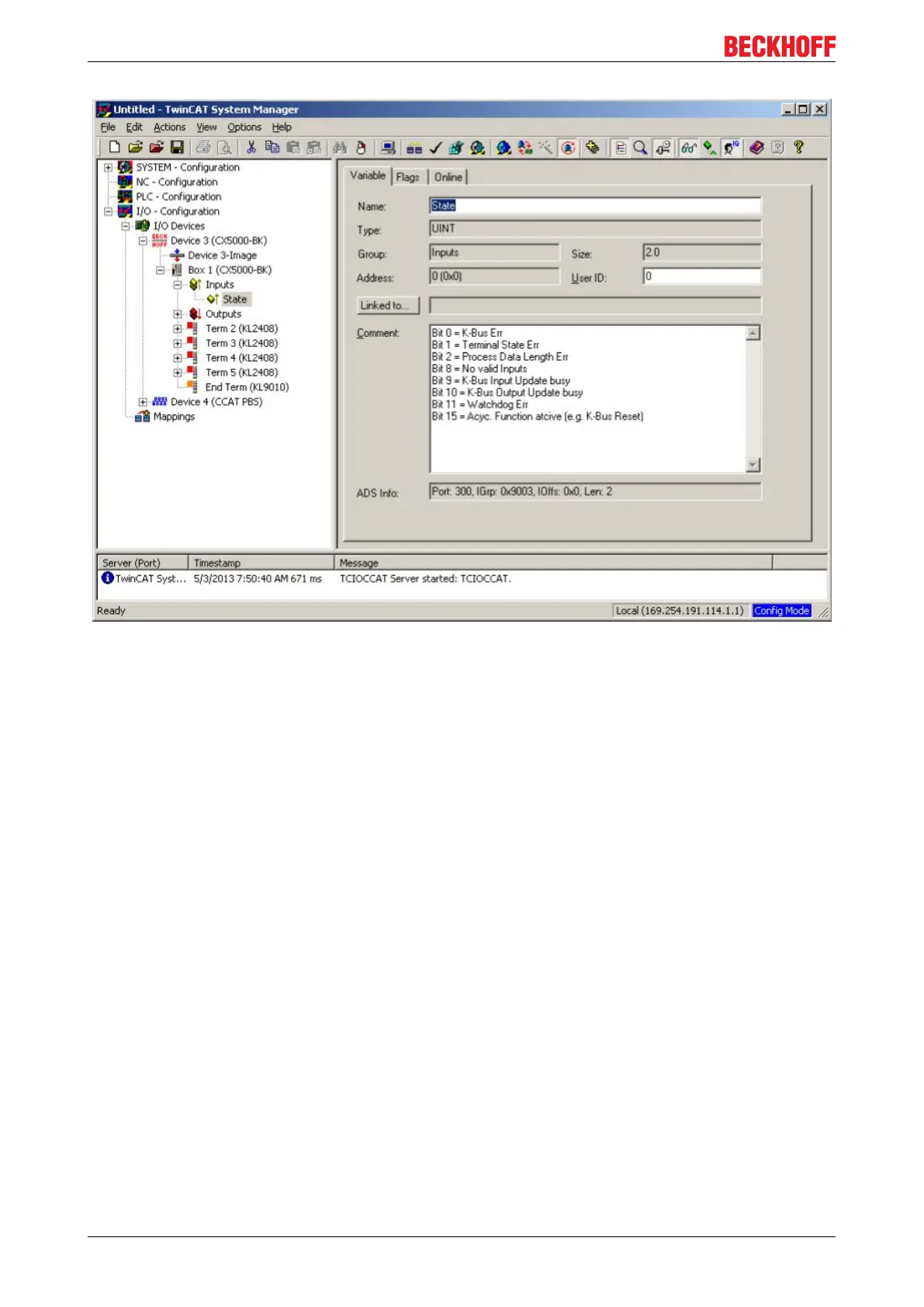
Guides on adding and configuring the CX51x0 with serial interface in TwinCAT.
Describes the correct procedures for switching the Embedded PC on and off.
Explains the LEDs on the basic CPU module and their diagnostic meanings.
Lists common faults, their causes, and suggested correction measures.