2. Wait a few seconds for the ROV to auto-connect and the green parameters bar to nish loading from left
to right.
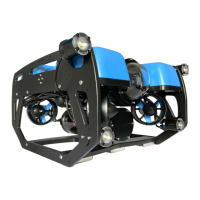
3. The video stream and telemetry information should now be shown in the QGroundControl application.
Update Software
There are two computers installed on the BlueROV2: a Pixhawk autopilot, and a Raspberry Pi 'companion'
computer. Before proceeding, we will check that the software on both computers is up to date, and update
the software if necessary.
These are the current software versions (updated 15 April 2019):
Companion: v0.0.17 (release notes (https://github.com/bluerobotics/companion/blob/master/release-notes.txt))
ArduSub: v3.5.4 (release notes (https://github.com/ArduPilot/ardupilot/blob/master/ArduSub/ReleaseNotes.txt))
Companion
Companion is the software that runs on the Raspberry Pi. To perform a companion software update:
1. Plug a _fully charged_ battery into the ROV and connect the tether to your computer.
2. Navigate to 192.168.2.2:2770/network (http://192.168.2.2:2770/network) in your browser and ensure that
the ROV has access to a WiFi network. If you do not see a webpage at this address, you need to perform the
update according to the instructions here (http://discuss.bluerobotics.com/t/software-updates/1128).
3. Navigate to 192.168.2.2:2770/system (http://192.168.2.2:2770/system). Click the button that says 'Update
companion'. If you do not see this button, then the companion software is up to date.
4. The update process will take between 5 and 20 minutes depending on the Internet connection speed.
Wait for the update process to complete.
5. When it completes, refresh your browser. The companion version should be updated, and the update
available message should no longer appear.
6. If the update fails (usually due to a loss of internet connectivity), you will be warned that the ROV will
reboot and to leave the battery plugged in. At this point, once you are able to refresh the webpage, it is safe
to either power down the ROV or attempt the update again.
ArduSub
ArduSub is the software that runs on the Pixhawk autopilot. To perform an ArduSub software update:
1. Navigate to 192.168.2.2:2770/network (http://192.168.2.2:2770/network) and ensure that the ROV has an
internet connection.
If the video stream is not shown or the vehicle does not connect, please follow the ArduSub Troubleshooting
Guide (https://www.ardusub.com/troubleshooting/troubleshooting.html) before contacting Blue Robotics
Support.
 Loading...
Loading...
