2-31 Options
2 Robot arm
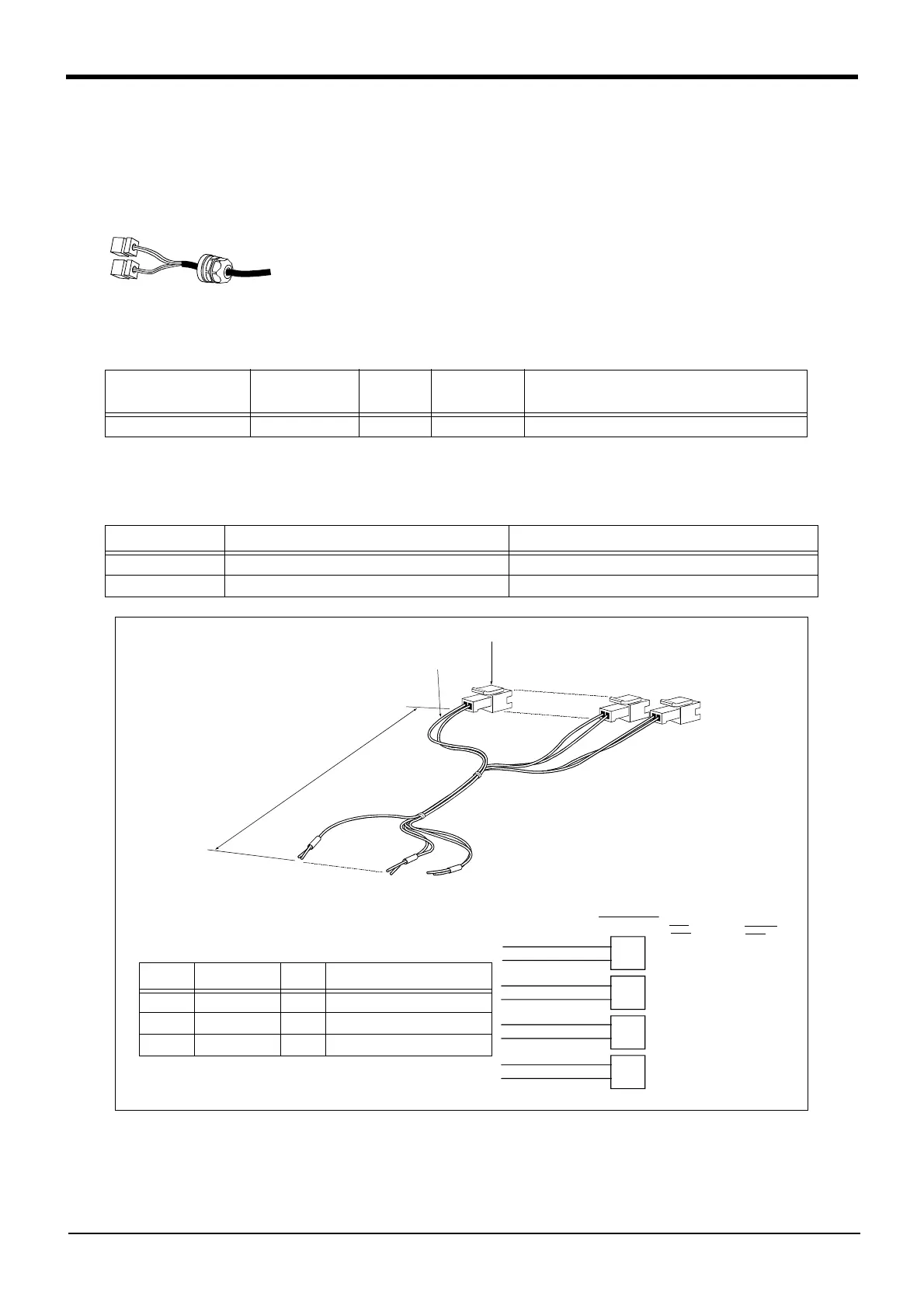
(5) Hand output cable
■ Order type: 1E-GR35S
■ Outline
The hand output cable (solenoid valve connection cable) is an option that is used
when an solenoid valve other than one of the solenoid valve set options, is used.
One end of the cable has a connector that connects to the input terminal inside the
robot. The other end of the cable is connected.
■ Configuration
Table 2-16 : Configuration equipment
■ Specifications
Table 2-17 : Specifications
Fig.2-15 : Outline dimensional drawing and pin assignment
[Cautions] When you install this optional one in the protection specification type, please seal the fixing section of
the robot with silicon rubber by the customer.
[Caution] This option can be installed on clean-type, but its cleanliness is not under warranty.
Part name Type Qty.
Mass(kg)
Note1)
Note1) Mass indicates one set.
Remarks
Hand output cable 1E-GR35S 1 cable 0.1
Item Specifications Remarks
Size x Cable core AWG#22(0.3mm
2
)×8 cores One side connector and one side cable connection
Total length 350mm
1
2
1
2
1
2
1
2
GR1
GR2
GR3
GR4
Connector
White
Black
Hand 1 ON
+24V
Hand 1 OFF
+24V
Hand 2 ON
+24V
Hand 2 OFF
+24V
Hand 1 ON
+24G
Hand 1 OFF
+24G
Hand 2 ON
+24G
Hand 2 OFF
+24G
Sink
Source
type
type
general-purpose
output 900
general-purpose
output 901
general-purpose
output 902
general-purpose
output 903
White
Black
White
Black
White
Black
*末端バラ線渡
し
3
5
0
*
*
*
(3)
(1)(2)
・ Configuration
Part no. Part name Qty. Specifications
( 1 ) Connector 4 SMR-02V-B
( 2 ) Contact 8 SYM-001T-0.6
( 3 ) Twisted cable 4 AWG#22 (0.3mm
2
)×2 cores
* End cable connection
 Loading...
Loading...




