i
APPLICATION
EXAMPLES
I
IWeldingRobot
I
I
Robot control system application
1
Items controlled
Positioning mechanism, spot welder, welding gun and inverter
Overall aim
After the welding points are determined by teaching, automatic welding is done in a
playback mode,
Advantages
A
low
cost and simple welding robot is possible, without the need for a high cost
specialized controller.
Method
of
control description
When the welding machine
is
manually operated in "teaching" mode, the position is
detected by the position control module AlSD7142. At stop, the position is stored
in a data register. Thereafter, only the welding points are taught.
In "playback" mode, position data is read out in the correct order and the welder is
positioned and performs welding. During positioning the welder speed is controlled
by the inverter. Stopping accuracy is approximately
+/-
0.5
mm, and accumulative
errors have been eliminated by the sequence program.
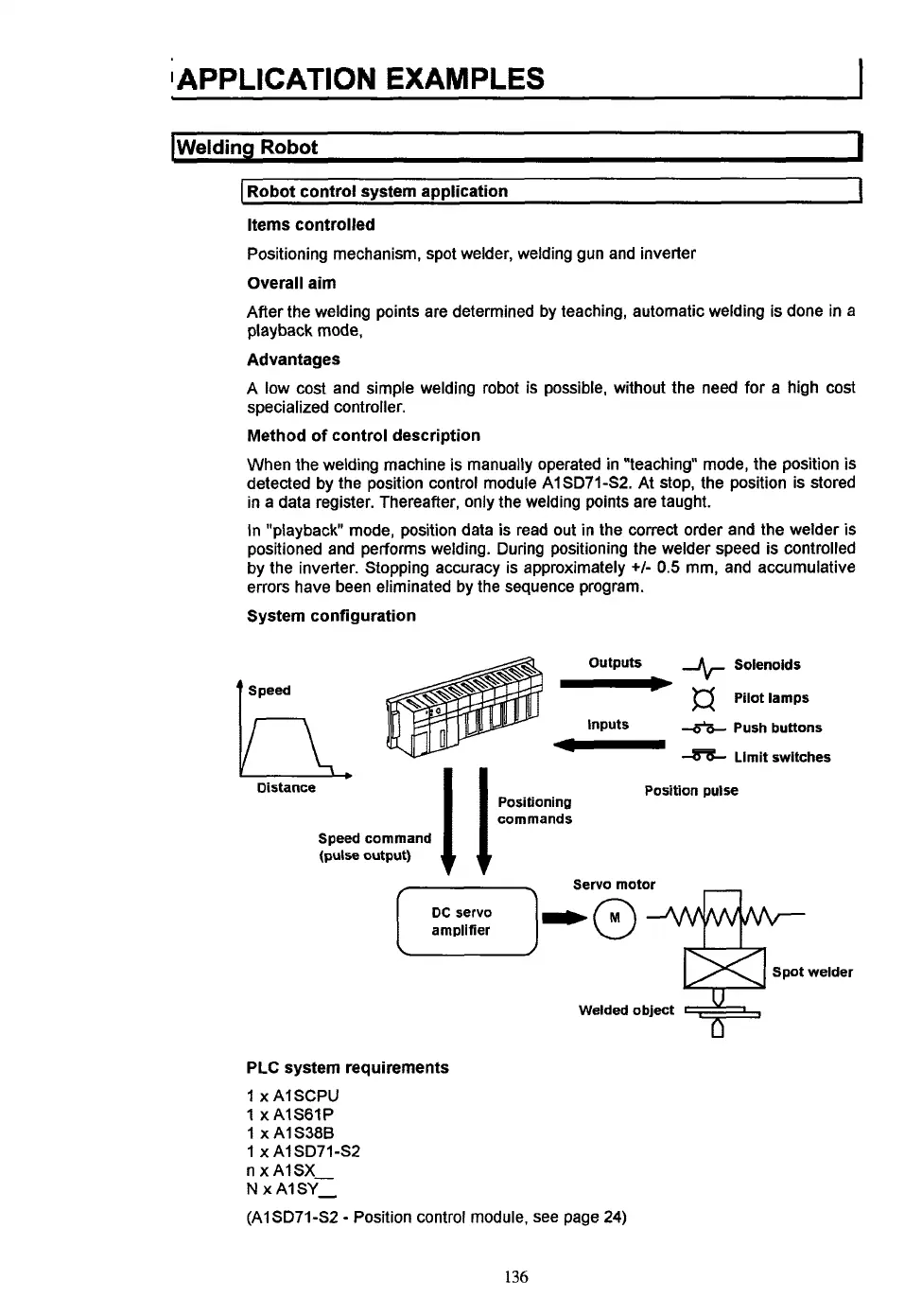
System configuration
Distance
Speed
(pulse
outputs Solenoids
a
Pilot lamps
-
inputs
&
Push buttons
-
Limitswitches
Servo motor
DC
servo
amplifier
I)-
@
w elder
Welded object
PLC
system requirements
1 x AISCPU
1
xAIS6IP
1
x
AI
S38B
n
x
AISX-
N
x
AI
SY-
(AI SD71-S2
-
Position control module, see page
24)
1
xAISD~I-SZ
136
 Loading...
Loading...