4. Common Error Messages
When an error occurs the controller will beep. To recover from an error press the reset
button on the teach pendant or on the robot controller. If the emergency stop button
was pushed, it must be pulled out before pressing reset.
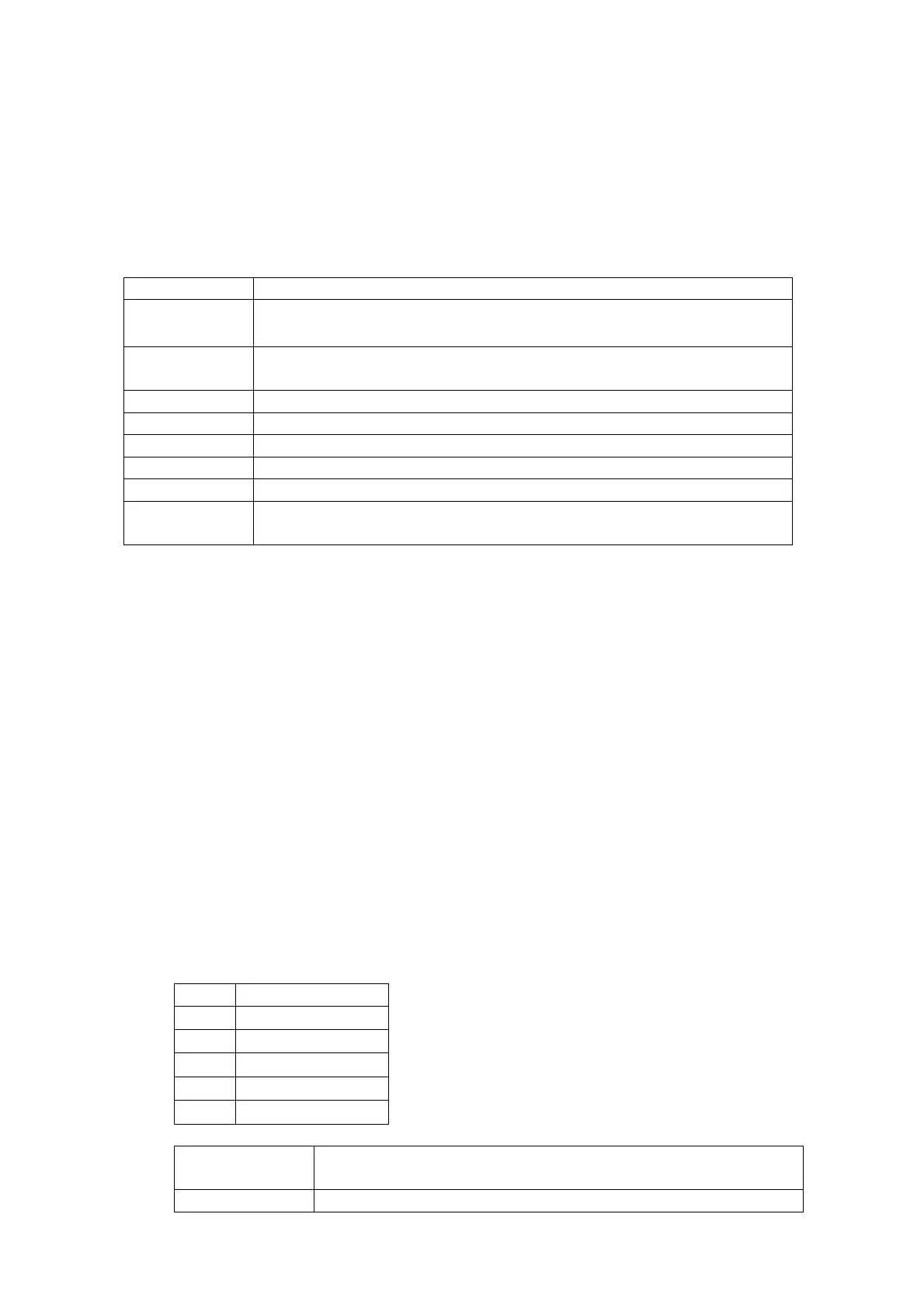
In some cases an error a code will appear on the screen. Common error codes are
listed below:
Code Meaning
L2800 –
L2803
position data is inadequate.
*
L2600 –
L2603
position is out of range
*
H0060 Emergency Stop on controller was pushed
H0070 Emergency Stop on T/B was pushed
H5000 The T/B Enable key was validated in the automatic mode.
H1010 Collision
C1350 Overload (possibly Collision)
C4340 Variable not defined (you forgot DEF POS or you forgot to
download the teach-point file)
If the code is not listed please consult [2].
* On an error message while trying to go to a pre-programmed teach point there
several possible causes:
• The target position is outside the robots workspace (joint reaches the limit
while trying to reach the target position). Try adjusting the target position
slightly. A fraction of a millimetre can be enough.
• the teach point file (.POS) is corrupt.
Edit the .POS file with MS Notepad (not RoboExplorer!) and confirm that the
last bracket of each position is (6,0) and not (0,0)
• An interpolation or inverse kinematics error can occur if you use MVS (move
linear) commands and a calculated target position rather than a learned
teach-point. Also avoid angles at exactly -/+180.0°.
5. Working Envelope Limits
Joint space limits:
Joint Limit
J1
-150° to +150°
J2
- 60° to +120°
J3
-110° to +120°
J5
- 90° to + 90°
J6
-200° to +200°
Z > 44 mm To prevent the end effector from hitting the work surface
(table)
X > - 220 mm To prevent the robot from reaching behind
RV-2AJ Robot Programming LAB NOTES Version 0.6 Nov 2005
11
 Loading...
Loading...





