5 - 11
5 EtherCAT Communications
E3NW-ECT EtherCAT Digital Sensor Communication Unit Operation Manual (E429)
5-6 EtherCAT Master Unit - Slave Unit Communications
5
5-6-1 FREE RUN Mode
5-6 EtherCAT Master Unit - Slave Unit
Communications
This section explains the communication modes between the Master Unit and E3NW-ECT EtherCAT
Slave Unit.
In the FREE RUN mode, a Slave Unit operates asynchronously with the EtherCAT Master Unit.
To calculate the input and output response time* of the entire system, refer to the relevant values in the
manual of the host system (EtherCAT Master or CPU Unit) to be used.
* This is the time which takes for an input signal from an Input Slave Unit to be processed by the PLC of the Master
Unit and output to an Output Slave Unit.
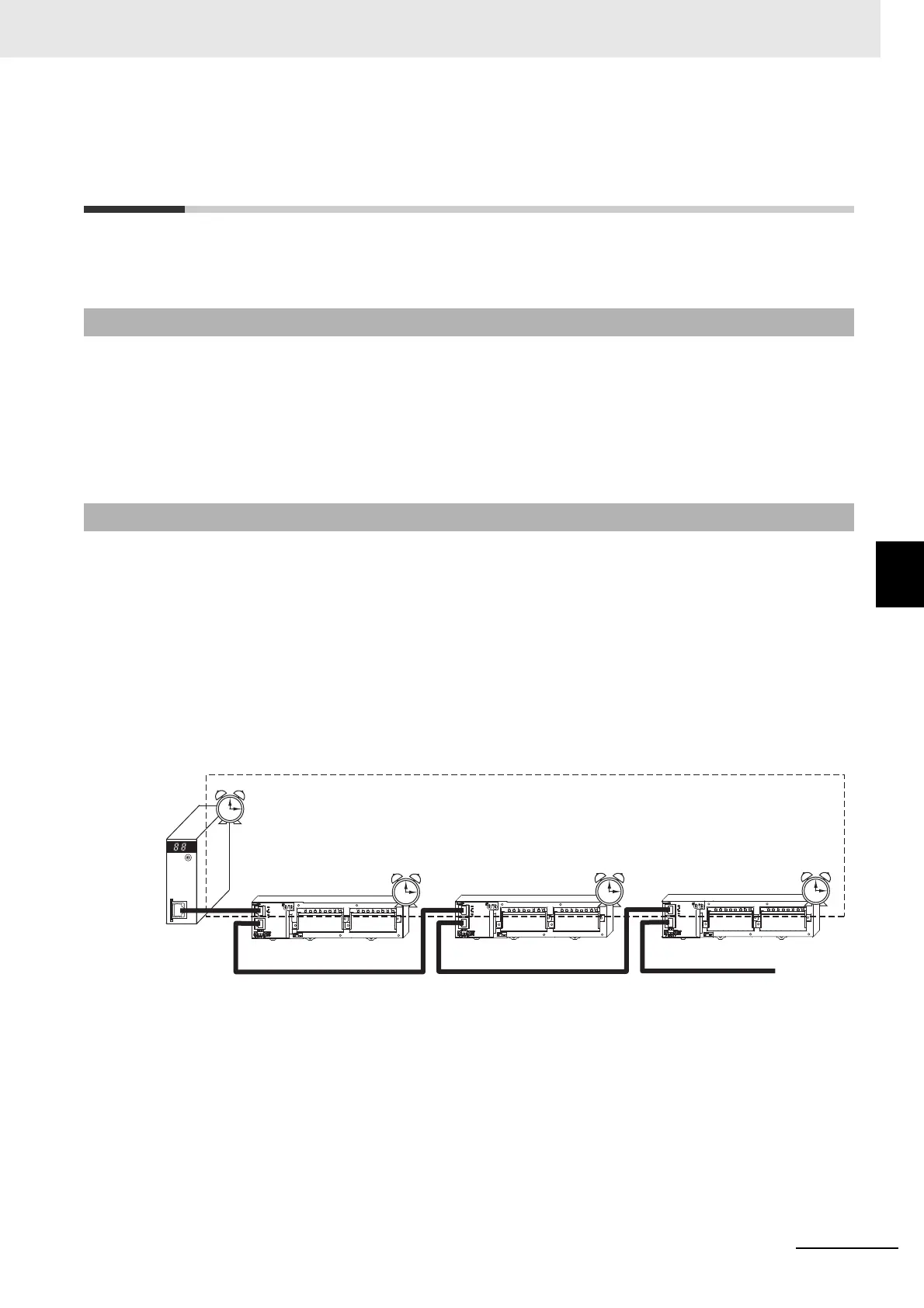
In the DC mode, a Slave Unit operates synchronously with the EtherCAT Master Unit.
A mechanism called distributed clock (DC), where the EtherCAT Master Unit and Slave Units share the
same clock, is used for synchronization.
Each of DC mode-ready Slave Units connected to EtherCAT shares the clock information.
By generating interrupt signals and executing input/output processing inside each Slave Unit according
to the clock, it becomes possible to synchronize the input/output timing with other Slave Units.
The DC mode supported by E3NW-ECT Units is DC mode 1.
Communications cycle
The communications cycle is determined by setting output frequency of Sync0 signal (interrupt
signal in DC mode 1).
500 μs, 1 ms, 2 ms, 4 ms
The settings are performed on the EtherCAT Master Unit side. For the setting method, refer to the
manual of the EtherCAT Master Unit to be used.
5-6-1 FREE RUN Mode
5-6-2 DC Mode
Set common clock information among the EtherCAT Master Unit and Slave Units
to match the time mutually.
EtherCAT
Master Unit
Slave Unit
 Loading...
Loading...






