E5jJ
E5jJ
Fuzzy Self-tuning
Fuzzy self-tuning is a function that enables the E5jJ to calculate
the
most suitable PID constants for the controlled object.
Features
The E5
j
J judges by itself when to perform fuzzy self-tuning.
Fuzzy Self-tuning Function
The
fuzzy self-tuning function has three modes.
In
SR
T
(step response tuning) mode, the PID constants are tuned
using
a step response method at the time the set point is changed.
In
DT (disturbance
tuning) mode, the PID constants are amended
so
that the controlled temperature will be within the target range
set in advance when there is external disturbance.
In HT (hunting tuning) mode, when hunting occurs, the PID
constants
are amended to suppress the hunting.
Note: Be
sure to turn on the
power supply to the load either before
or simultaneously with the start of T
emperature Controller
operation.
Dead
time will be measured
from the time the T
emperature
Controller starts operating. If a load such as a heater is
turned on after the Temperature Controller is turned on,
dead time longer than the actual value will be measured
and
inappropriate PID constants will be obtained. If an ex
-
tremely
large amount of dead time is
measured, the control
amount will be set to 0% for a short period of time before
being
returned to 100%, and the constants will then be
re
-
tuned. Retuning is performed only for large amounts of
dead
time, so be sure to
follow the precaution given above
when
starting operation.
Startup Conditions of SRT
SRT
will start if the following conditions are satisfied simultaneously
when
the E5
j
J is turned on or the set point is changed.
At the time the E5
j
J starts
operating
At the time set point is
changed
1. The
set
point at the time the
E5jJ starts operating is
different from the set point
used at the time SRT was
last
executed (see note).
2. The
dif
ference between
the
set point and the process
value at the time the E5jJ
starts operating is larger
than
the present proportion
-
al
band value (P) x 1.27+4.
3. The process value at the
time the E5jJ starts oper-
ating
is smaller than the set
point in reverse operation
and
larger than the set point
in
normal operation.
1. The new set point is differ-
ent from the set point used
at the time SRT was last
executed
(see note).
2. The set point changing
range is larger than the
present proportional band
value
(P) x 1.27+4.
3. The process value is in
stable condition before the
set
point is changed.
4. A larger set point value is
set
in reverse operation and
a smaller set point is set in
normal
operation.
Note: The
last SR
T
-executed set point is set to 0 before shipping
and
when changing from 2-PID control to 2-PID control with
fuzzy
self-tuning.
Imposition Completion Condition of Step Control Amount
In order to prevent overshooting, the step controlled amount must
be imposed continuously only while the present deviation is the
same as or greater than the value obtained from the proportional
band
(P) x 1.27. The step control will not be applied when the devi
-
ation
becomes smaller than this value.
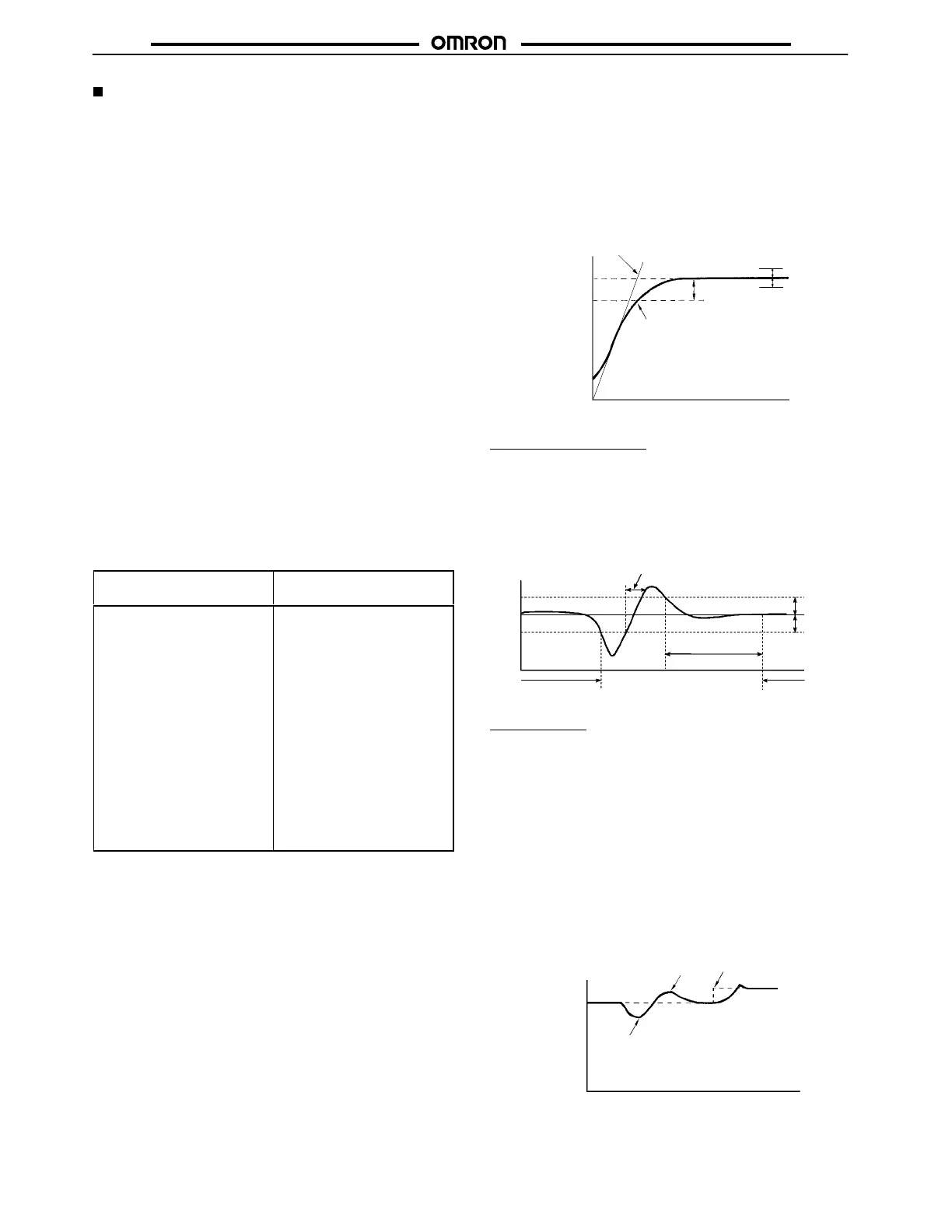
PID Constant Refreshing Conditions
If
the step control amount is applied before the maximum
tempera
-
ture
slope (R) is obtained, SR
T will not renew any PID constant. If
the proportional band obtained from the R and L values that were
measured
before the imposition had been completed is larger than
the present proportional band, the PID constants will be renewed
because
the measured value is in the direction towards the
suitable
proportional band value, and the set point at that time will be the
SRT-executed
set point.
Temperature
Slope (R)
Completion
of
SR
T
Stable range
Time
SP
P x 1.27
Stable
T
emperature Status
If the temperature is within the stable range for a certain time, it is
deemed that the temperature is stable. This time is called stability
judgement
time. Like PID constants, stability judgement time is ad
-
justed
with fuzzy
self-tuning according to the characteristics of the
object
to be controlled. Fuzzy
self-tuning will not be activated if the
temperature is stable because the Temperature Controller deems
that
temperature control is smooth.
Shorter than the stability judgement time
Set
point
Stable
range
Stable
range
(Set
to
15.0_C
before
shipping)
Stability judgement time
Stable Stable
Balanced
Status
If
the process value is within the stable range for 60 s when there is
no
output, it is deemed that the the temperature is balanced.
Startup Conditions of DT
1. DT
will start if the temperature that has been stable varies due
to
external
disturbance and the deflection of the temperature
exceeds the stable range, and then the temperature
becomes stable, provided that the number of maximum
temperature
values is less than four
.
2. DT
will start if the set point is changed under the condition that
SRT does not start and the temperature becomes stable,
provided
that the number of maximum temperature values is
less
than four
.
If there are four or more maximum temperature values, HT
will
start.
SP
Temperature
Extreme value 2
Set point change
Time
Extreme value 1
 Loading...
Loading...









