4-7
CHAPTER 4 Adjustment
(2) Setting the Z-axis soft limits
Make this setting from outside the safeguard enclosure.
The Z-axis has mechanical stoppers xed at the upper and lower ends of
the Z-axis movement range. When the actual working range of the robot is
smaller than the maximum working envelope or the manipulator interferes
with the peripheral equipment, reduce the Z-axis plus (+) soft limit [pulses]
to narrow the working envelope.
(3) Setting the R-axis soft limit
To make this setting, set emergency stop just as for the X-axis and Y-axis,
or be sure to do this from outside the safeguard enclosure. The R-axis has
no mechanical stoppers. When the actual working range of the R-axis is
small or it interferes with the peripheral equipment, reduce the R axis plus
(+) soft limit [pulse] and minus (-) soft limit [pulses] to narrow the working
envelope.
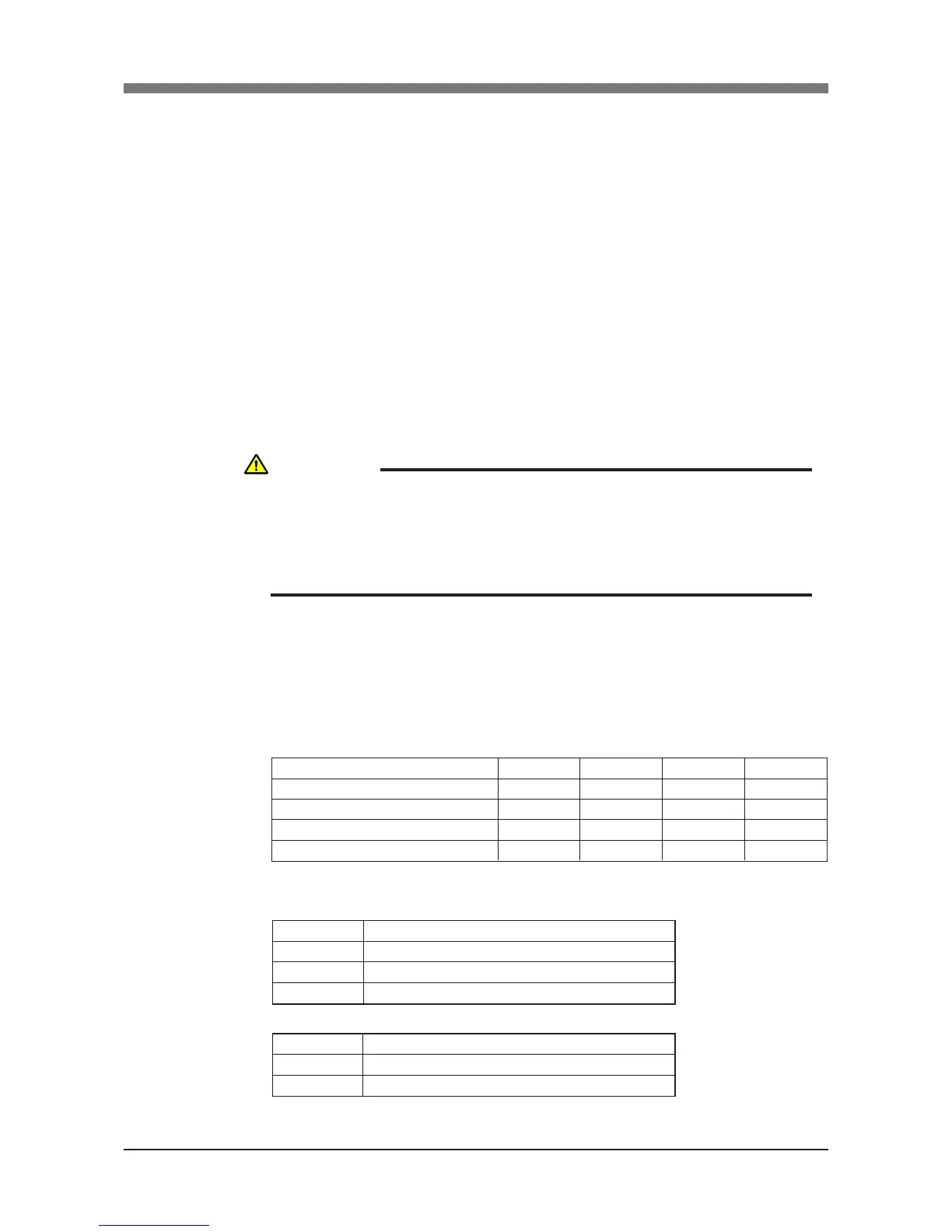
(4) Relation between the X, Y and R-axis movement angle, the Z-axis move-
ment distance and the number of pulses
The tables below are for calculating resolver pulses with respect to the X, Y
and R-axis movement angles and to the Z-axis movement distance for each
robot. Use these gures as a guide to set the soft limits.
X, Y and R-axis speed reduction ratio and Z-axis ball screw lead for each robot
Operation angle/distance vs. number of resolver pulses
Robot model
R6YXCH250, R6YXCH350, R6YXCH400
R6YXC500, R6YXC600
R6YXC700, R6YXC800
R6YXC1000
X-axis
50
80
80
100
Y-axis
50
80
80
80
Z-axis
12mm
20mm
20mm
20mm
R-axis
50
50
50
50
Lead
12mm
20mm
Number of
resolver
pulses per lead movement
16384
16384
Z-axis
Speed ratio
50
80
100
Number of resolver pulses per turn (360 degrees)
819200
1310720
1638400
X, Y and R-axis speed reduction ratio
CAUTION
OVERLOADS MAY OCCUR IF THE SOFT LIMIT IS ALMOST NEAR THE
ENCODER PULSE AT THE MECHANICAL STOPPER AND THE
OPERATING POINT IS USED AT THE EDGE OF THE MOVEMENT RANGE.
SET THE SOFT LIMIT TO THE INNER SIDE OF THE MECHANICAL
STOPPER WITH AN AMPLE SAFETY MARGIN.
 Loading...
Loading...





