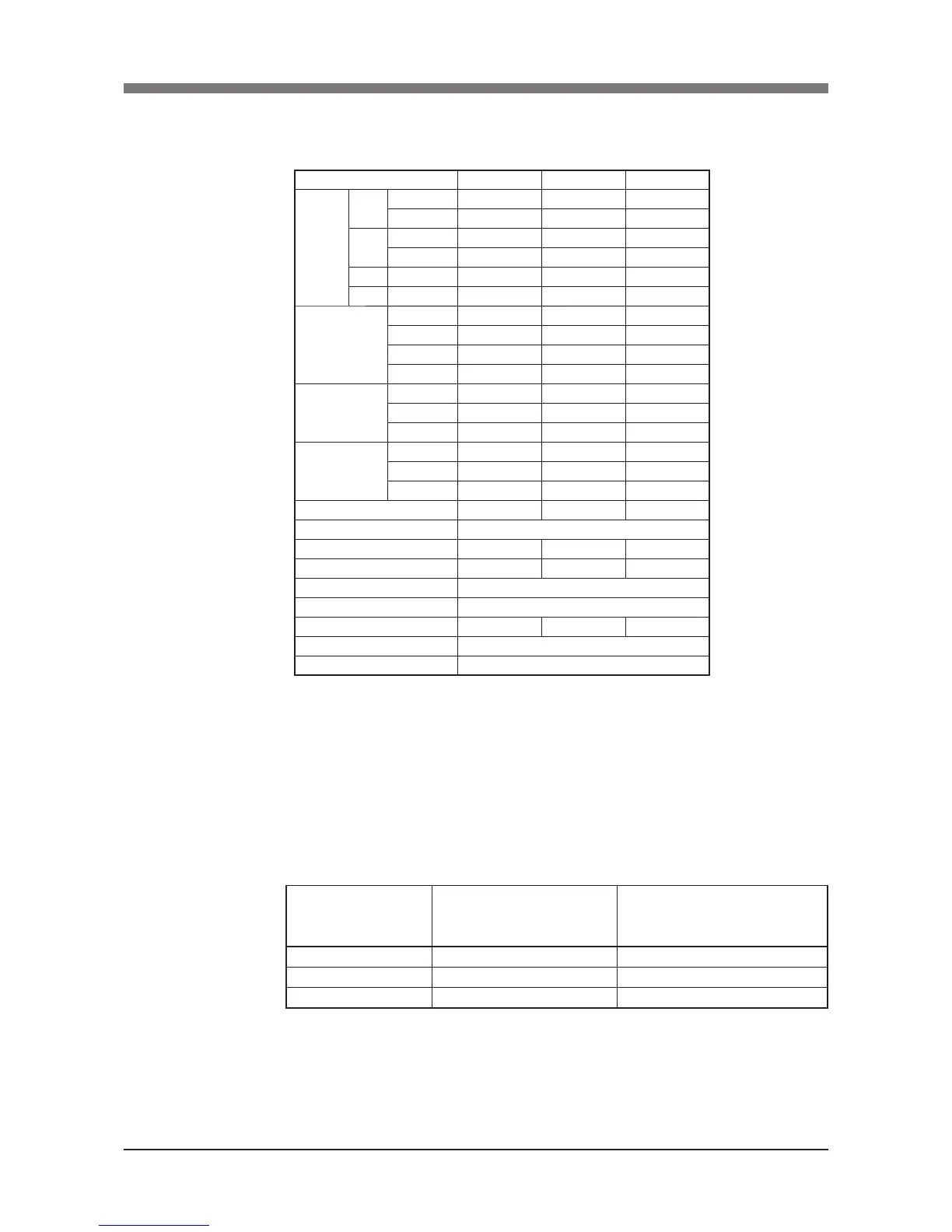
R6YXC700
350mm
±120º
350mm
±145º
200, 400mm
±180º
800W
400W
400W
200W
6.7m/s
1.7m/s
600°/s
±0.02mm
±0.01mm
±0.005º
20kg
20 cables
6x3
57kg 58kg 59kg
R6YXC800
450mm
±120º
350mm
±145º
200, 400mm
±180º
800W
400W
400W
200W
7.3m/s
1.7m/s
600°/s
±0.02mm
±0.01mm
±0.005º
20kg
20 cables
6x3
R6YXC1000
550mm
±120º
450mm
±145º
200, 400mm
±180º
800W
400W
400W
200W
8.0m/s
1.7m/s
600°/s
±0.02mm
±0.01mm
±0.005º
20kg
20 cables
6x3
Arm length
Rotation angle
Arm length
Rotation angle
Stroke
Rotation angle
X-axis
Y-axis
Z-axis
R-axis
XY resultant
Z-axis
R-axis
X,Y-axes
Z-axis
R-axis
X-axis
Y-axis
Z-axis
R-axis
Motor
Maximum speed
Repeatability *1
Payload
R-axis tolerable moment of inertia *2
User wiring
User tubing (Outer diameter)
Travel limit
Robot cable
Weight
Cleanliness class
Suction air ow
1.Soft limit 2.Mechanical limit (XYZ-axes)
3.5m,option:5m,10m
Class 10 (0.1 micron base, during air suction)
60 Nl/min
Robot Model
*
1At constant ambient temperature (XY)
*
2 There are limits to acceleration coefficient settings.
0.32kgm
2
(3.2kgfcms
2
)
Axis
specifi-
cations
Sound level
Robot model
Maximum sound pressure level
of robot
(lat 10dB or more difference
from background sound
pressure level )
Position of maximum sound pressure
level
R6YXCH250, R6YXCH350, R6YXCH400
69.8dB 1.0m away from the rear of robot, 1.6m height
R6YXC500, R6YXC600
69.7dB 1.0m away from the rear of robot, 1.6m height
R6YXC700, R6YXC800, R6YXC1000
69.4dB 1.0m away from the rear of robot, 1.6m height
Note: Sound level may increase when sound reflecting objects are located near the robot .

 Loading...
Loading...




