28 EN
4. INSTALLATION
4.4.4. TRANSITION ROUTES
If there are areas of the garden that are separated from each other by areas that should not be mowed or
where there is no lawn, e.g. hard surfaces that are at the same level as the garden, it is possible to connect
the areas to be mowed using transition routes. The robot lawn mower will move from one area to another
with the cutting device switched o.
The transition route may be used also to reach the charging base when it is not installed within a working
area.
Procedure:
1. Assess the possible routes and choose the easiest transition route that allows the robot to maintain
the furthest distance from any obstacles and that does not cross areas usually used for parking or
the transit of vehicles or pedestrians.
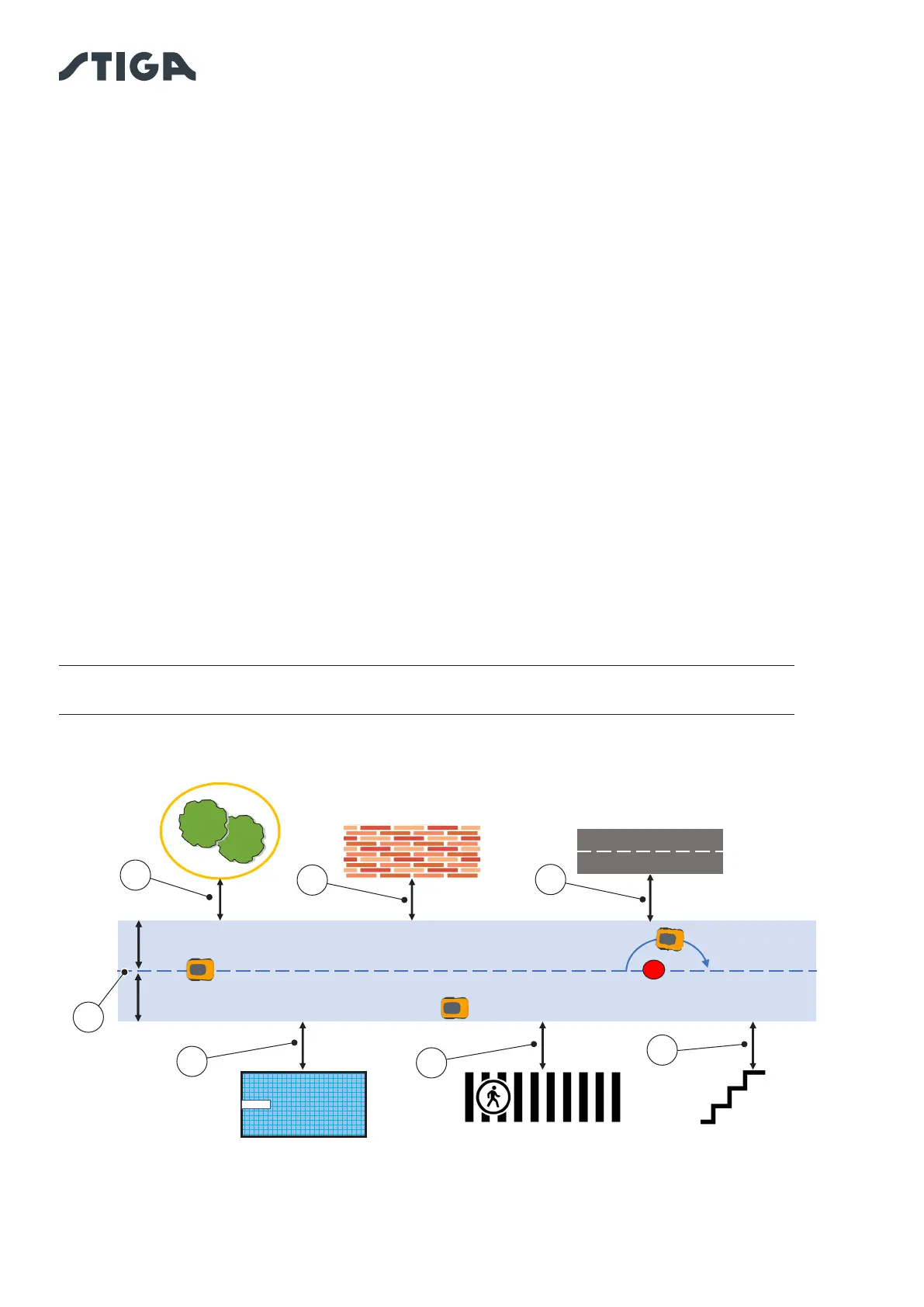
2. The transition route includes a manoeuvring zone extending 1 m to the right and 1 m to the left of the
programmed route (A). The following minimum distances between the manoeuvring area and the
various garden elements must be observed:
- 30 cm from obstacles conned by virtual perimeters or no-cut zones (B);
- 30 cm from xed obstacles without connes or continuous structural elements (C);
- 1m from public roads (D);
- 1m from pools (E);
- 1m from footpaths (F);
- 1m from clis or steep slopes (G).
3. Transition routes must respect the maximum slope limit of 20%.
4. In the case of narrow passages where the above distances cannot be met, the passage must be
cordoned o by fencing, if not already present.
NOTE: Transition paths programmed within narrow passages may have inadequate satellite
signal reception, aecting the robot lawn mower's operating accuracy.
1m
1m
≥ 30cm
≥ 1m ≥ 1m ≥ 1m
≥ 1m
≥ 30cm
A
B
C
D
E
F
G

 Loading...
Loading...





