AEMZP0BA - EPS-AC0 - User Manual Page - 19/95
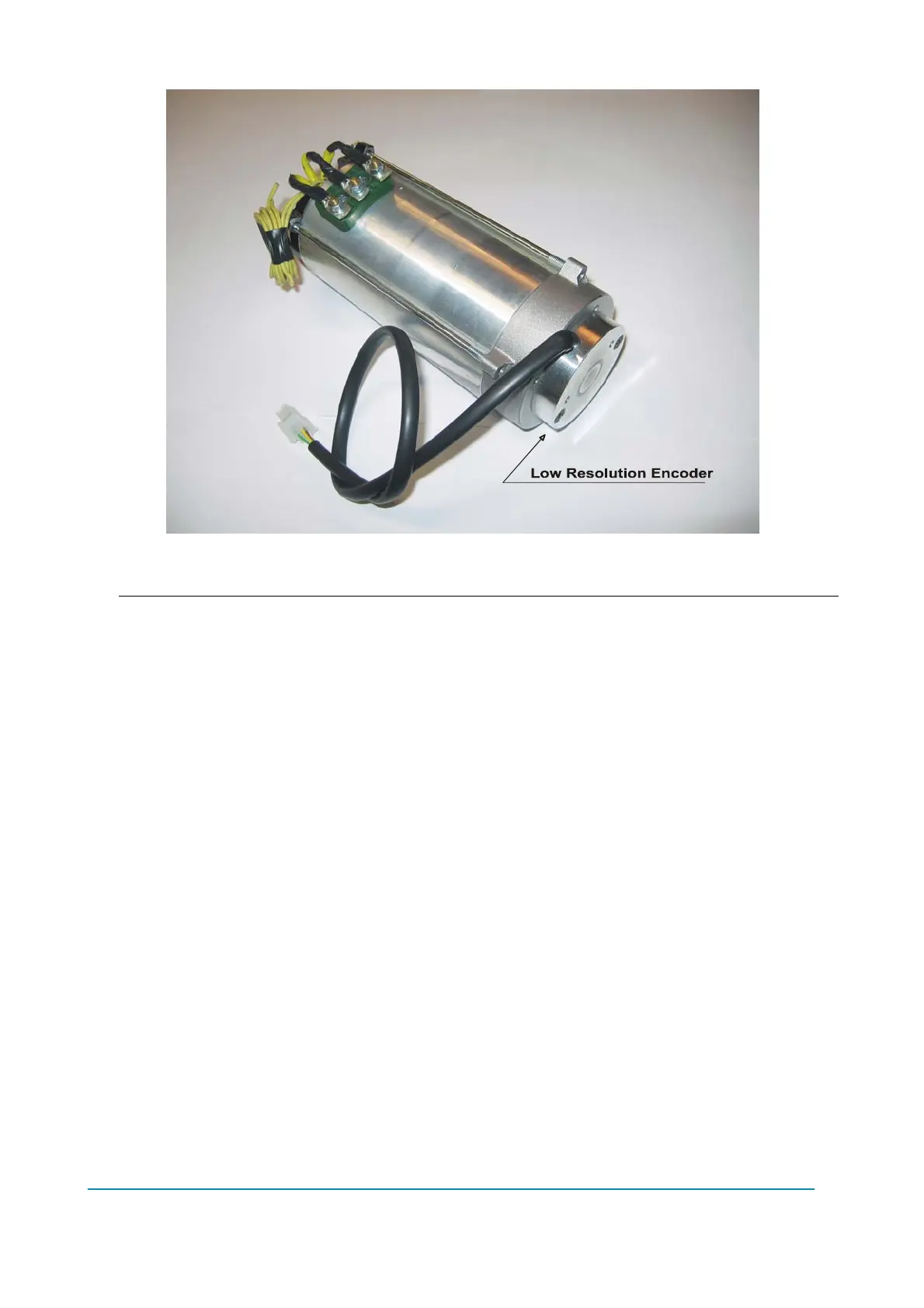
Figure 4-8
4 Note: On request, it is possible to use the encoder for the motor control. In this
case, the SW must know the encoder resolution together with the poles-pair
number. The encoder resolution and the motor poles pair (the controller can
handle), will be specified in the headline of the handset showing something
like:
EPSAC0S2A ZP0.70
That means:
EPSAC0=Eps-ac0 steering controller
S= Stepper motor
2= poles pair number
A= 32 pulses/rev encoder
ZP= SW release type Zapi
0.70= SW release number 0.70
The command configuration is specified through the first letter after EPSAC0
in the following list:
S= Stepper Motor
P= Twin Pot
C= via CAN Bus Position
D= via CAN Bus Speed
The encoder resolution is given by the last letter before of the SW release in
the following list:

 Loading...
Loading...

