2.2 Process interface ESAB, robot 2, B_AW_PROC_41
I/O board configuration, robot 2
This chapter describes the standard process configuration delivered by ABB
Robotics. Process Interface DeviceNet for ESAB Aristo™ Mig and W8.
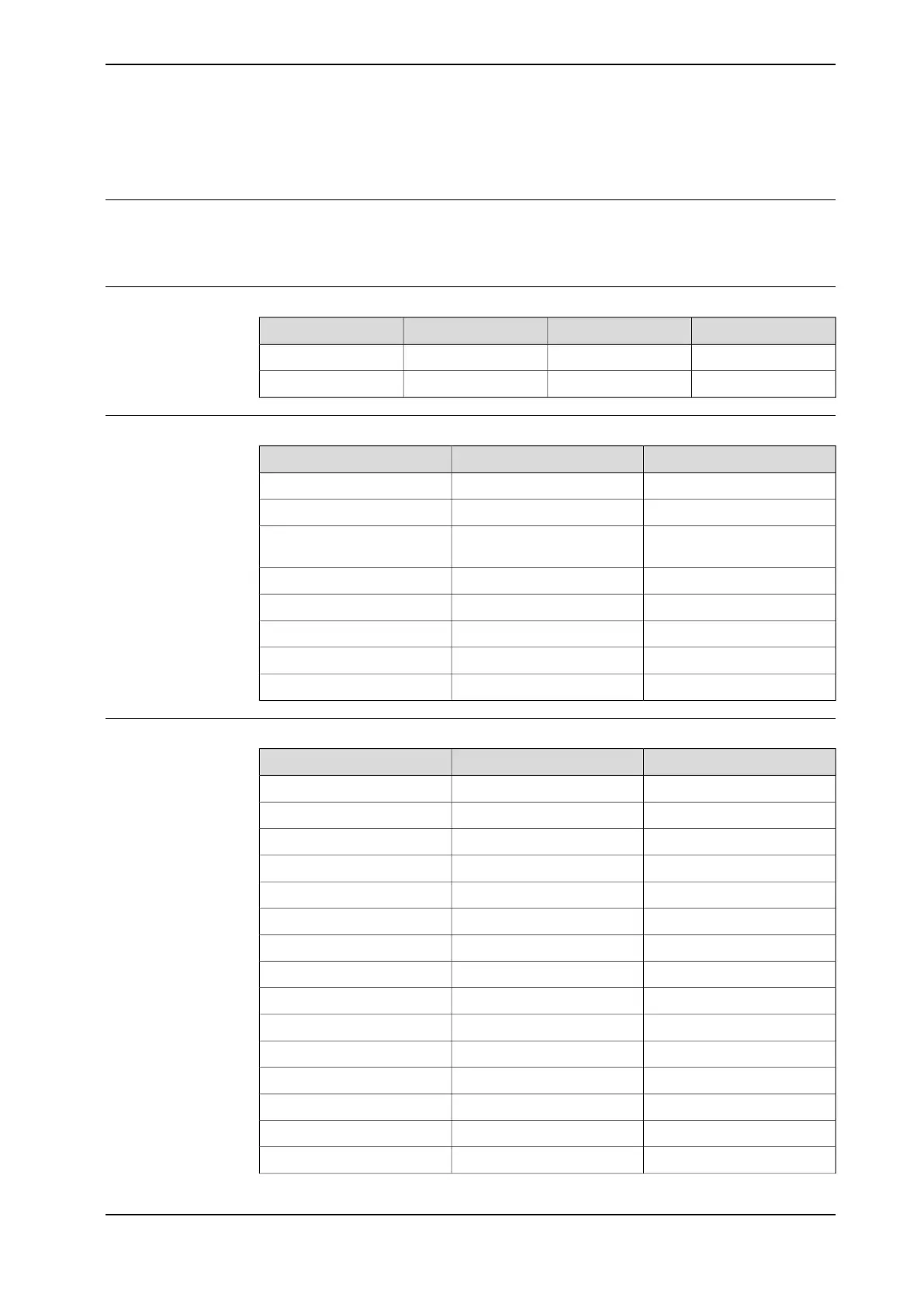
Board configuration
BusBoard typeNameAddress
CAN DeviceNetESAB_W8B_AW_PROC_4141
VirtualSimulated digital I/OB_SIM_AW
Digital outputs
DescriptionNameDevice Map
Activate power sourcedoWeld_20
Quick stop of power sourcedoQuickStop_21
Emergency stop of power
source
doEmStop_22
Activate wire feederdoFeed_23
Activate gas valvedoGas_24
Activate air cleaning of torchdoAir_25
Activate wire feeder reversedoFeedBwd_26
Activate tactile search modedoTouchSenseActive_215
Digital inputs
DescriptionNameDevice Map
Arc establisheddiArcEst_248
Weld establisheddiWeldEst_249
Search contact establisheddiTouchSenseContact_250
Wire feed unit 1 selecteddiWF1Selected_252
Wire feed unit 2 selecteddiWF2Selected_253
Wire feed unit 3 selecteddiWF3Selected_254
Wire feed unit 4 selecteddiWF4Selected_255
Error codediError1_256
Error codediError2_257
Error codediError3_258
Error codediError4_259
Error codediError5_260
Error codediError6_261
Error codediError7_262
Error codediError8_263
Continues on next page
Application manual - Signal description for arc welding products 15
3HAC050975-001 Revision: -
© Copyright 2004-2016 ABB. All rights reserved.
2 Signal configuration
2.2 Process interface ESAB, robot 2, B_AW_PROC_41
 Loading...
Loading...







