162 Rockwell Automation Publication 22C-UM001J-EN-E - January 2017
Appendix D Application Notes
PID Deadband
Parameter A158 [PID Deadband] is used to set a range, in percent, of the PID
Reference that the drive will ignore.
Example
• [PID Deadband] is set to 5.0
• The PID Reference is 25.0%
• The PID Regulator will not act on a PID Error that falls between 20.0
and 30.0%
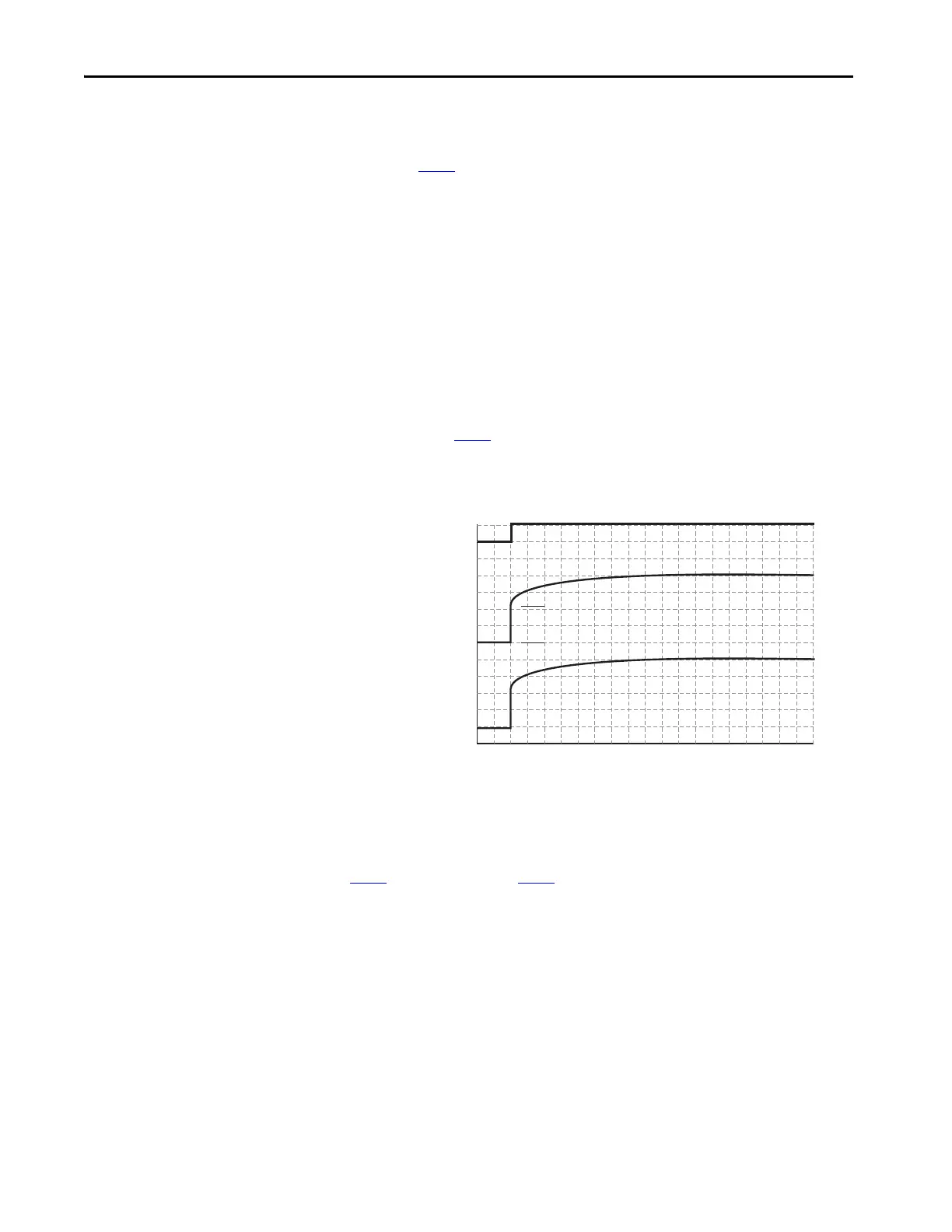
PID Preload
The value set in A159 [PID Preload], in Hertz, will be pre-loaded into the
integral component of the PID at any start or enable. This will cause the drive’s
frequency command to initially jump to that preload frequency, and the PID
loop starts regulating from there.
PID Limits
A150 [PID Trim Hi] and A151 [PID Trim Lo] are used to limit the PID
output and are only used in trim mode. [PID Trim Hi] sets the maximum
frequency for the PID output in trim mode. [PID Trim Lo] sets the reverse
frequency limit for the PID output in trim mode. Note that when the PID
reaches the Hi or Lo limit, the PID regulator stops integrating so that windup
does not occur.
PID Gains
The proportional, integral, and differential gains make up the PID regulator.
PID Enabled
Freq Cmd
PID Output
PID Pre-load Value
PID Pre-load Value > 0
 Loading...
Loading...