Basics
EK110x, EK15xx34 Version: 3.6
In Safe-Op state mailbox and process data communication is possible, although the slave keeps its outputs
in a safe state, while the input data are updated cyclically.
Note
Outputs in SAFEOP state
The default set watchdog monitoring sets the outputs of the module in a safe state - de-
pending on the settings in SAFEOP and OP - e.g. in OFF state. If this is prevented by de-
activation of the watchdog monitoring in the module, the outputs can be switched or set
also in the SAFEOP state.
Operational (Op)
Before the EtherCAT master switches the EtherCAT slave from Safe-Op to Op it must transfer valid output
data.
In the Op state the slave copies the output data of the masters to its outputs. Process data and mailbox
communication is possible.
Boot
In the Boot state the slave firmware can be updated. The Boot state can only be reached via the Init state.
In the Boot state mailbox communication via the file access over EtherCAT (FoE) protocol is possible, but no
other mailbox communication and no process data communication.
3.4 CoE - Interface: notes
This device has no CoE.
Detailed information on the CoE interface can be found in the EtherCAT system documentation on the
Beckhoff website.
3.5 EKxxxx - Optional Distributed Clocks support
Basic principles Distributed Clocks (DC)
The EtherCAT Distributed Clocks system comprises local clocks that are integrated in the EtherCAT slaves
and are synchronized by the EtherCAT master via special datagrams. Not all EtherCAT slaves support the
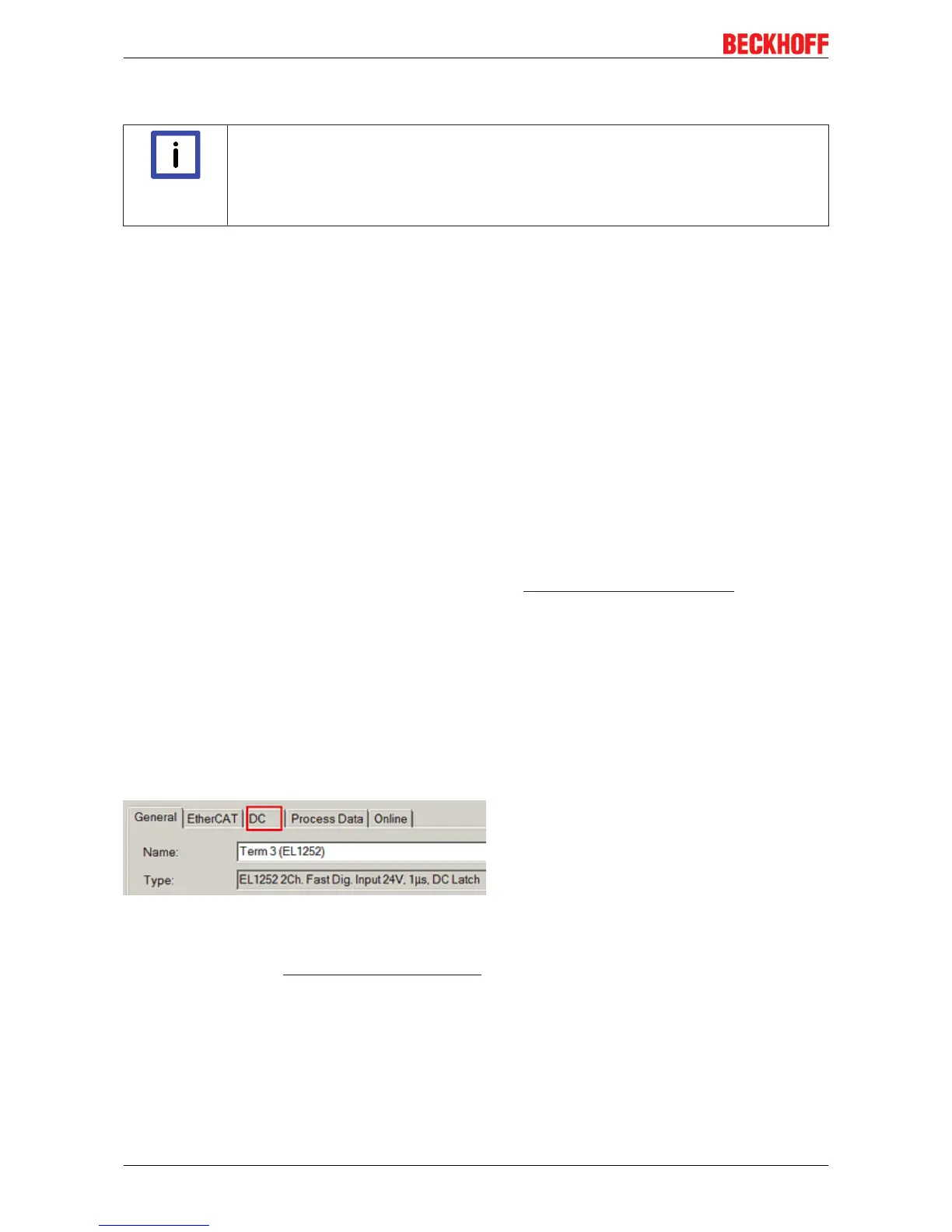
Distributed Clocks procedure. It is only supported by slaves whose function requires it. In the TwinCAT
System Manager a slave indicates its DC capability by showing “DC” in the settings dialog.
Fig.18: DC tab for indicating the Distributed Clocks function
Once of these local clocks is the reference clock, based on which all other clocks are synchronized. See also
explanatory notes in the Basic EtherCAT documentation. The reference clock must be the first DC-capable
EtherCAT slave. By default TwinCAT therefore selects the first DC-capable device as reference clock. This is
shown (and can be modified by the user) under advanced properties of the EtherCAT master. The standard
setting should not be changed, except in cases where external synchronization is recommended in the
relevant documentation, for example.
 Loading...
Loading...


