111 Min. frequency normal magnetizing
(MIN FR NORM MAGN)
Value:
0.1 - 10.0 Hz
1.0 Hz
Function:
This parameter is used in connection with parameter
110. See drawing in parameter 110.
Description of choice:
Set the required frequency (for normal magnetizing
current). If the frequency is set lower than the motor
slip frequency, parameters 110 and 111 are of no sig-
nificance.
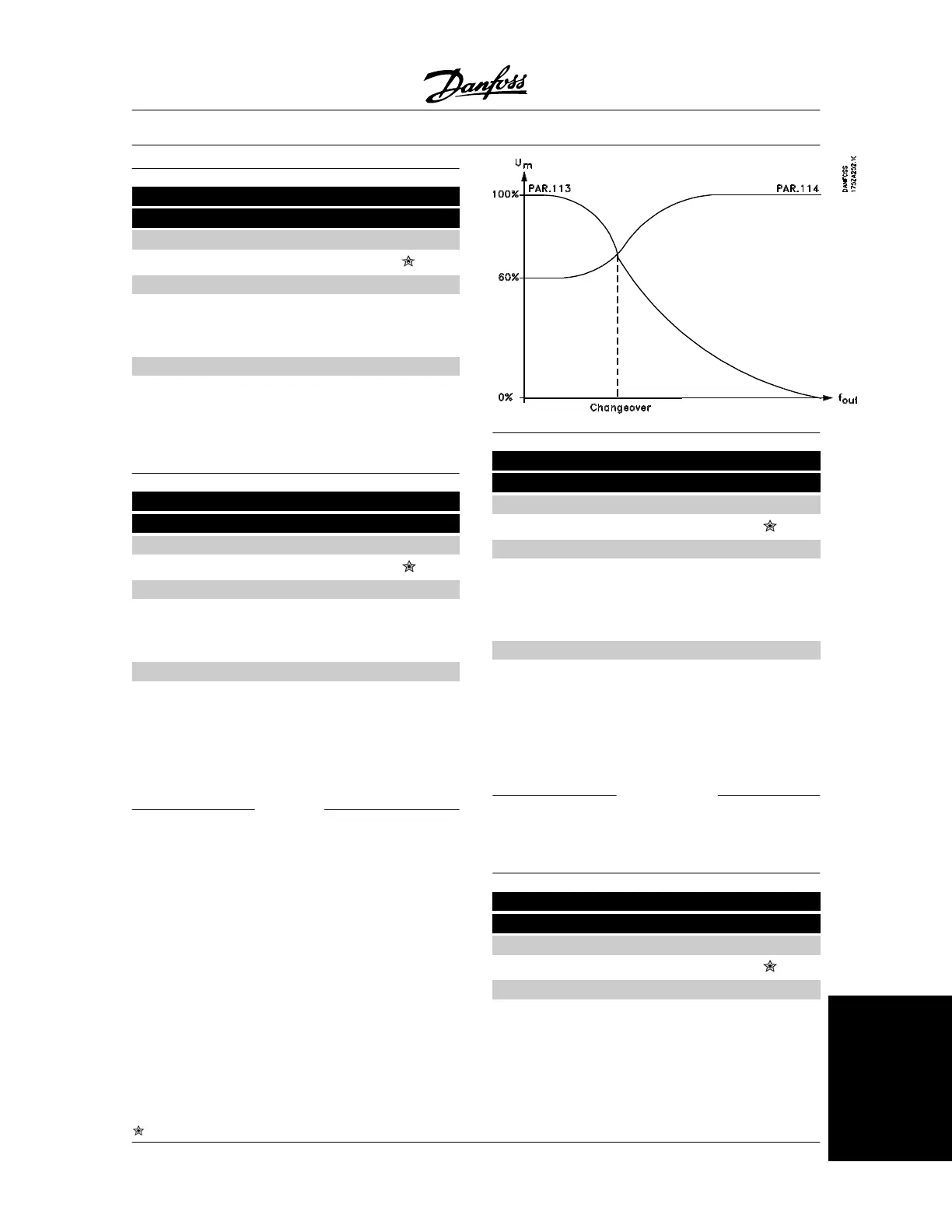
113 Load compensation at low speed
(LO SPD LOAD COMP)
Value:
0 - 300 %
100 %
Function:
This parameter enables compensation of voltage in
relation to load when the motor is running at low speed.
Description of choice:
Optimum U/f characteristics are obtained, i.e. com-
pensation for the load at low speed. The frequency
range within which Load compensation at low speed
is active, depends on the motor size.
This function is active for:
Motor size
Change-over
0.5 kW - 7.5 kW < 10 Hz
11 kW - 45 kW < 5 Hz
55 kW - 355 kW < 3-4 Hz
114 Load compensation at high speed
(HI SPD LOAD COMP)
Value:
0 - 300 %
100 %
Function:
This parameter enables compensation of voltage in
relation to load when the motor is running at high
speed.
Description of choice:
In Load compensation at high speed it is possible to
compensate for the load from the frequency where
Load compensation at low speed stopped working to
max. frequency.
This function is active for:
Motor size
Change-over
0.5 kW - 7.5 kW >10 Hz
11 kW - 45 kW >5 Hz
55 kW - 355 kW >3-4 Hz
115 Slip compensation
(SLIP COMPENSAT.)
Value:
-500 - 500 %
100 %
Function:
Slip compensation is calculated automatically, i.e. on
the basis of the rated motor speed n
M,N
.
VLT
®
5000 Series
= factory setting, () = display text, [] = value for use in communication via serial communication port
MG.51.C5.22 - VLT
p
is a registered Danfoss trademark. 93
Programming
 Loading...
Loading...



