Select Torque control, speed feedback, if an encoder
feedback signal is to be generated. This is relevant in
winder and extruder applications.
Torque control, speed feedback, is selected if it is to be
possible to change the speed direction, while at the
same time maintaining the torque reference.
Set the following parameters in order shown:
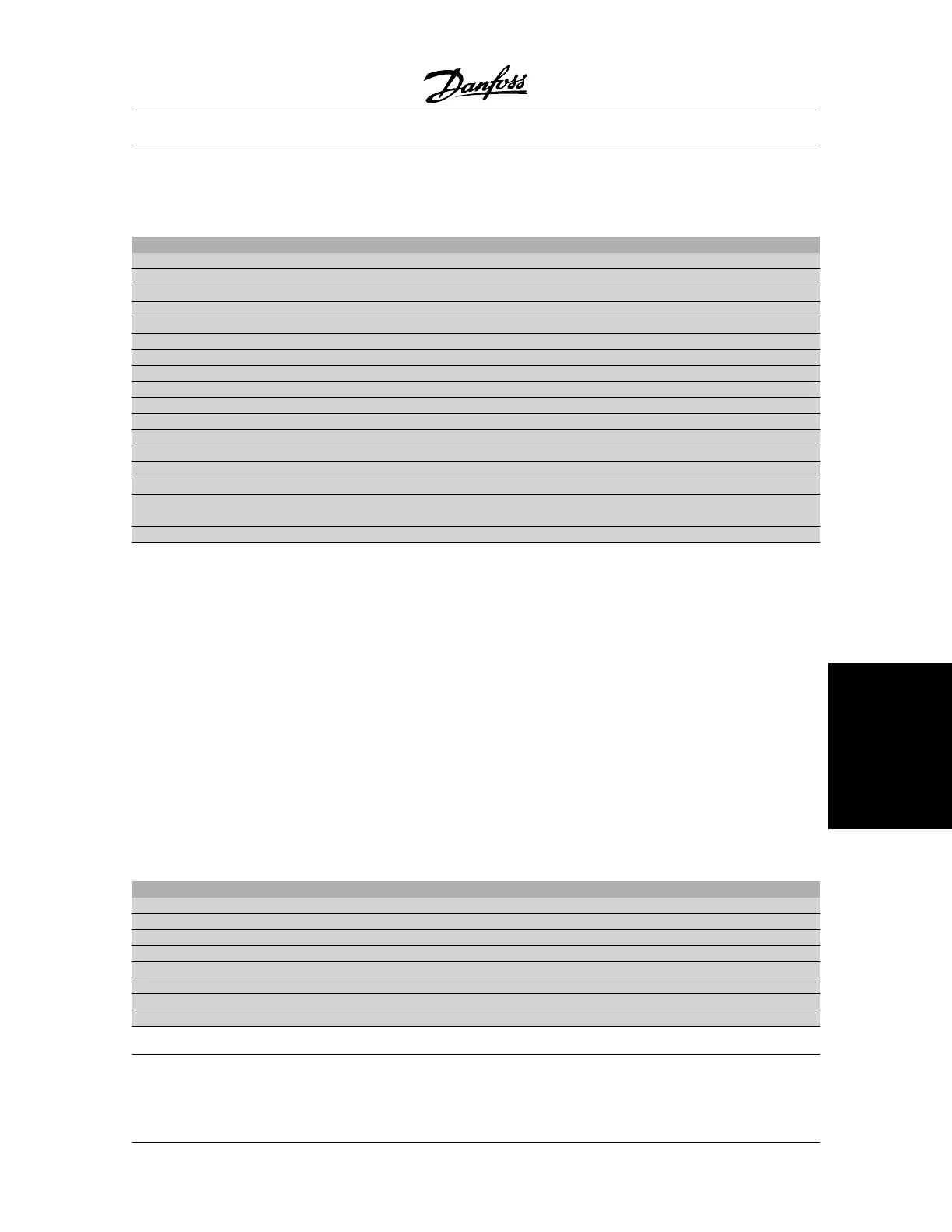
Torque control, speed feedback:
Parameter: Setting: Data value:
100 Configuration Torque control, speed feedback [5]
200 Output frequency, range/direction
201 Output frequency, low limit
202 Output frequency, high limit
203 Reference/feedback range
204 Minimum reference Only if [0] in par. 203
205 Maximum reference
414 Minimum feedback
415 Maximum feedback
306 Encoder feedback, input B [24]
307 Encoder feedback, input A [25]
329 Encoder feedback, pulse/rev
421 Speed PID low-pass filter time
448 Gear ratio
447 Torque regulation, speed feed-
back
449 Friction loss
After Torque control, speed feedback, has been selec-
ted, the adjustable frequency drive should be calibra-
ted to ensure that the current torque equals the torque
of the adjustable frequency drive. For this to be ensur-
ed, a torque gauge must be fitted to the shaft so as to
enable accurate adjustment of parameter 447, Torque
compensation, and parameter 449, Friction loss. It is
recommended to run an AMA before torque calibra-
tion. Proceed as follows before beginning to use the
system:
1. Fit a torque gauge to the shaft.
2. Start the motor with a positive torque refer-
ence and a positive direction of rotation.
Read the torque gauge.
3. Using the same torque reference, change the
direction of rotation from positive to negative.
Read the torque and adjust it to the same
level as for the positive torque reference and
direction of rotation. This can be done by
means of parameter 449, Friction loss.
4. Using a warm motor and approx. 50% load,
set parameter 447, Torque compensation, to
match the torque gauge. The adjustable fre-
quency drive is now ready for operation.
Select Special motor characteristics if the adjustable
frequency drive is to be adapted to a synchronous mo-
tor, parallel motor operation or if slip- compensation is
not required.
Set the following parameters in order shown:
Special motor characteristics:
Parameter: Setting: Data value:
101 Torque characteristics Special motor characteristics [5] or [15]
432 + 431 F5 frequency/U5 voltage
430 + 429 F4 frequency/U4 voltage
428 + 427 F3 frequency/U3 voltage
426 + 425 F2 frequency/U2 voltage
424 + 423 F1 frequency/U1 voltage
422 U0 voltage
VLT
®
5000 Series
MG.51.C5.22 - VLT
p
is a registered Danfoss trademark. 187
List of functions
 Loading...
Loading...

