Functional safety
328
9.
FUNCTIONAL SAFETY
Design requirements
Ref.1912
DDS
HARDWARE
· 318 ·
Example 2.
SS1 application that meets with Cat. 3, PL d - SIL 2
This safety function corresponds to a controlled stop in accordance with stop
category 1 of IEC 60204-1.
The safety function SS1 referred to in this examples corresponds to type "c)
safe stop 1 time controlled ·SS1-t·” as defined in IEC 61800-5-2.
It starts the motor deceleration and performs the STO function after a delay
time that has been previously specified for the application, but it does not
monitor that the deceleration is performed satisfactorily, and thus the SS1-t
has a residual risk. See
SS1-t in 9.6 Residual risks.
Considerations
The auxiliary +24 V DC power supply that powers the external safety
controller must be independent from the input power controlled by the
main external contactor - KM1.
In order to achieve PL d or SIL 2, the external safety controller must
check the feedback of the safety function as often as it is demanded.
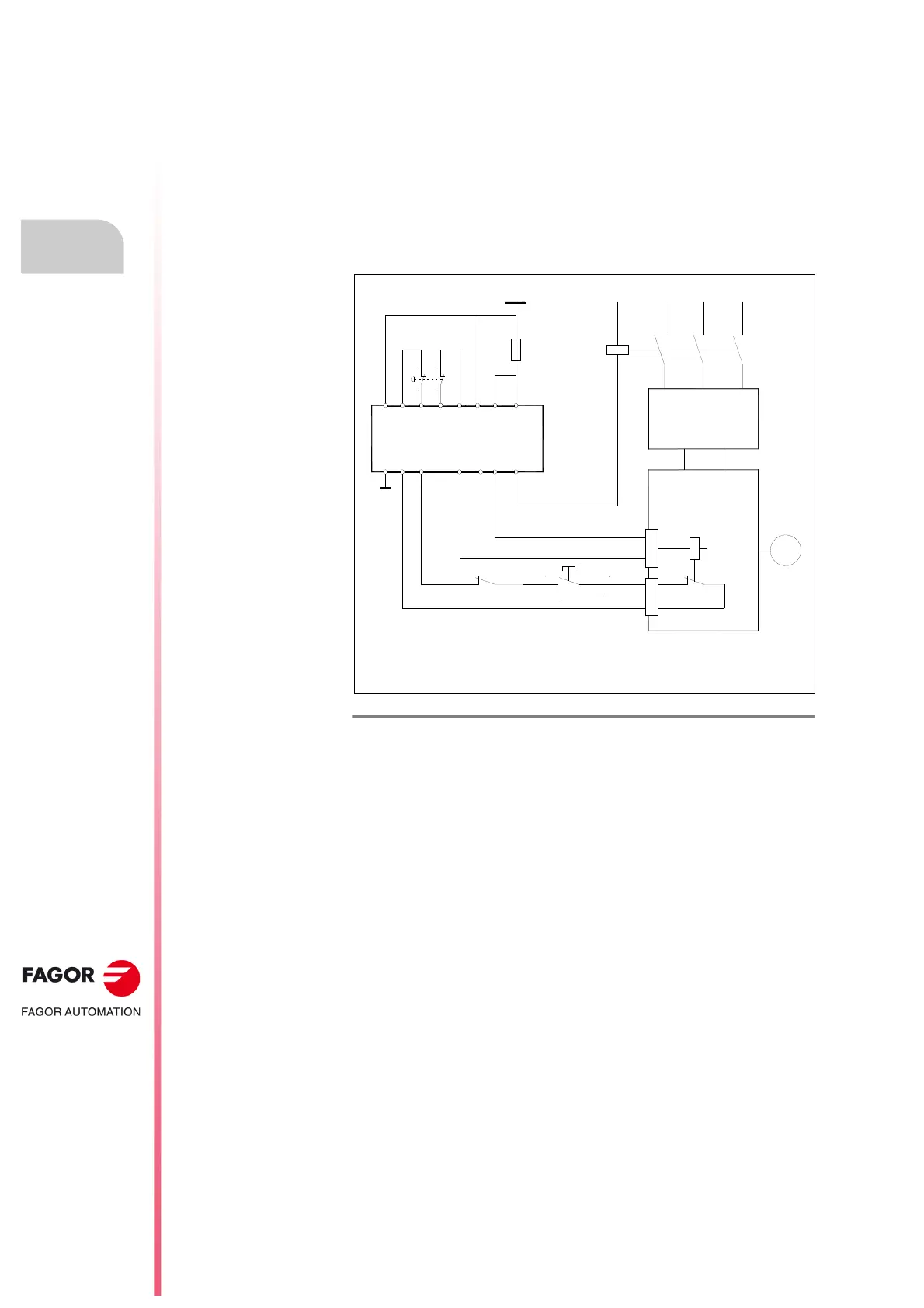
F. H9/3
SS1-t safety function, Cat. 3, PL d - SIL 2.
KM1 auxiliary contact of - KM1 with EN 60947-5-1 approval
State definition: Drive Enable = O
Torque Off
Positive logic
EXTERNAL SAFETY
CONTROLLER
Cat.3 PL d, ISO 13849-1
A1
A2
11 12 21 22 67
S33 S34
58 68
AXD/SPD
PS/XPS/RPS
57
24 V
- F
- KM1
M
X2
X7
Drive Enable
AS1
AS2
KM1 ON
LINE/MAIN
13
14 24
Speed Enable
 Loading...
Loading...