20. VARIABLE LIST
With this robot you can use built-in variables (which are built into the robot as functions), and
user-defined variables (which can be freely defined by the user).
User-defined Variables
Except for local variables (variables valid only in defined point job data which are defined by the
declare command), user variables are defined in the Customizing Mode.
Built-in Variables
In the character and expression entry screen, when [BVar] is displayed at the very bottom of the LCD
(above the F3 key), push the F3 key to view a list of the built-in variables.
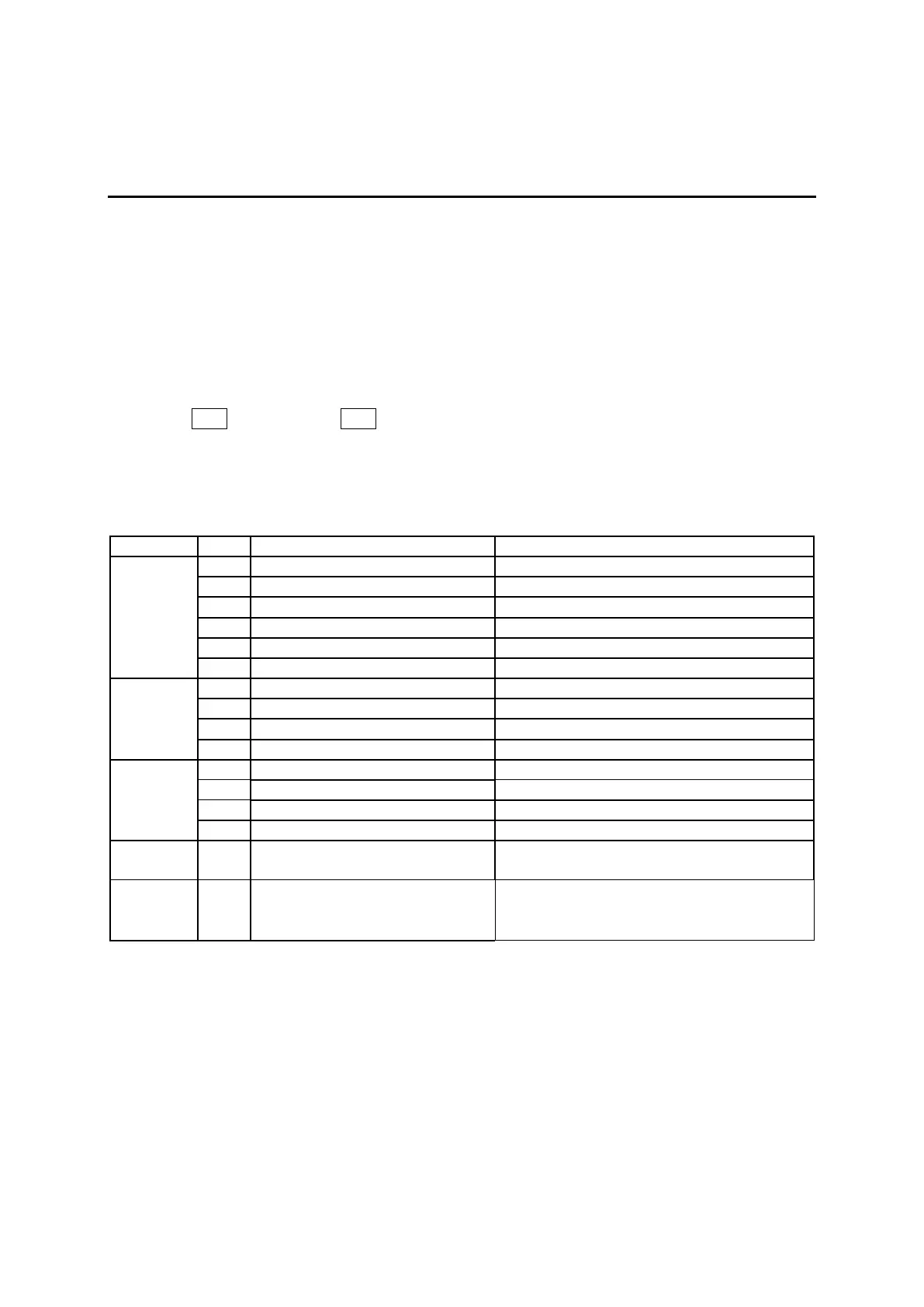
Boolean type (boo): 1-bit variable which holds only 1 (true) or 0 (false)
Numeric type (num): 8-byte real type (double type) variable
String type (str): 255-byte variable
Free
Variable
Boolean variable (Keeping variable)*
1
Numerical variable (Keeping variable)*
1
String variable (Keeping variable)*
1
Input
Variable
#sysIn1 – 16, #sysIn (1 – 16)
#genIn1 – 8, #genIn (1 – 8)
#fbIn(1000 – 17FF), 1 – 32*
2
Output
Variable
#sysOut1 – 16, #sysOut (1 – 16)
#genOut1 – 8, #genOut (1 – 8)
#fbOut(1800 – 1FFF), 1 – 32*
2
boo #sysFlag(1) – #sysFlag(999) Refer to “22. System Flag List”.
Buzzer boo #FBZ
set #FBZ: Sound the buzzer.
reset #FBZ: Stop the buzzer.
(onoffBZ: Sound the buzzer intermittently)
*
1
Variables which hold their values even if the robot is turned OFF are keeping variables.
*
2
Boolean input and output variables have two format types: one type with numbers enclosed in
brackets and one without brackets. Both of these are exactly the same.
If using the Fieldbus, the format types without brackets are considered Boolean (1 bit width)
variables. If accessing data with a bit width of two or more (numeric type (num)), use the variable
with brackets and specify the bit width.
111
 Loading...
Loading...

