19
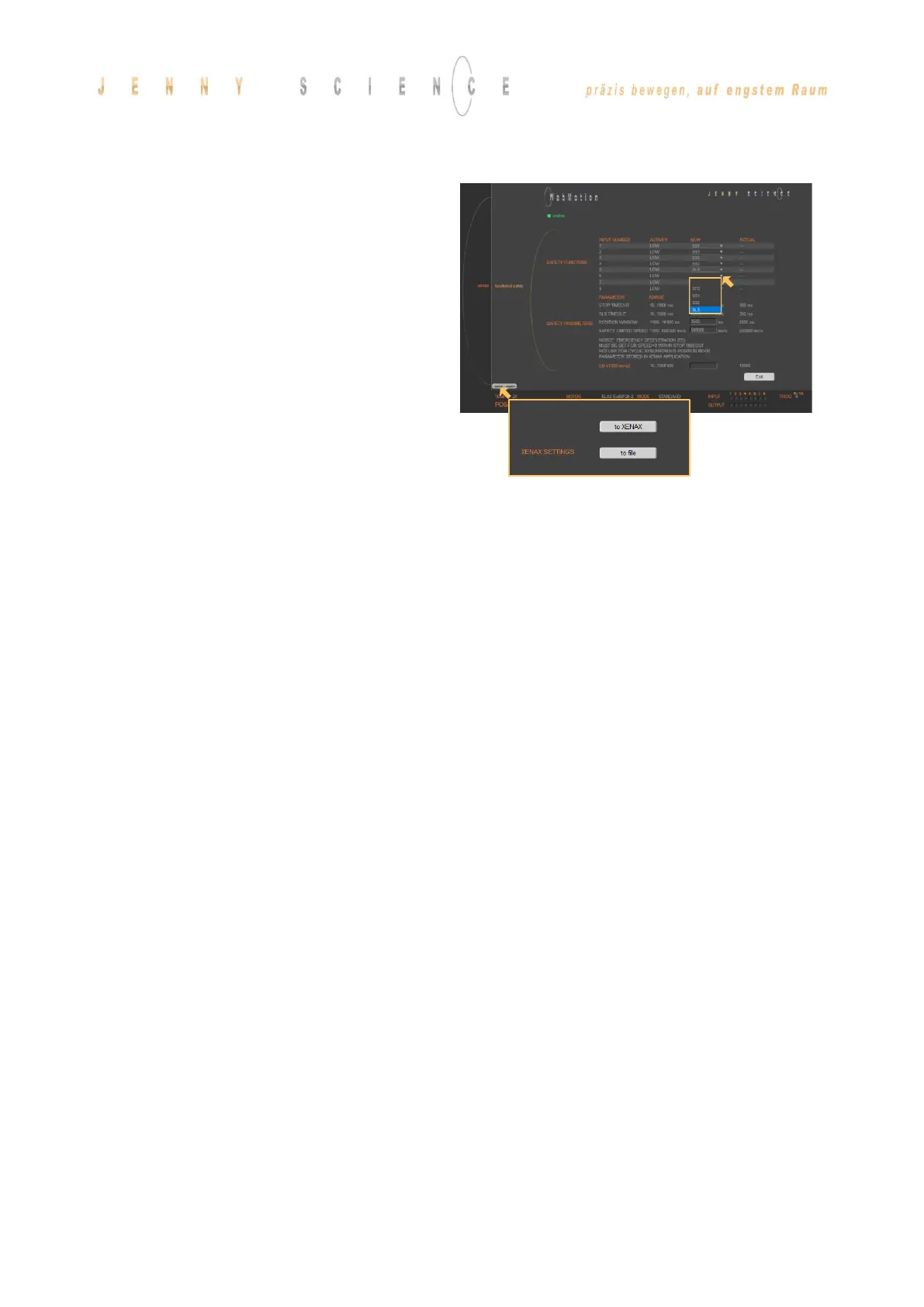
Actual
Current safety parameters of XENAX® servo
controller with SMU.
New
This is where new safety parameters can be selected
from the drop down menu. They are activated in
XENAX® servo controller by pressing „save“.
save
to XENAX®:
The modified safety parameters are being sent to
XENAX® / SMU. The active parameters are visible in
the column XENAX®.
to File:
The safety parameters on the SMU are saved into a
file.
open
Safety parameters can also be loaded from a pc file.
In order to be activated on the XENAX® servo
controller, the parameters have to be saved by
pressing on the save
→
to XENAX.
ED x 1000
The Parameter ED „Emergency Deceleration“ muss be
set as big, that STOP and SLS Timeout can be hold by
stopping.
By pressing „EXIT“ you exit functional safety and get
back to WebMotion®.
Note: The Signal of an active safety function has to be
operated by a higher level control system.
 Loading...
Loading...