67
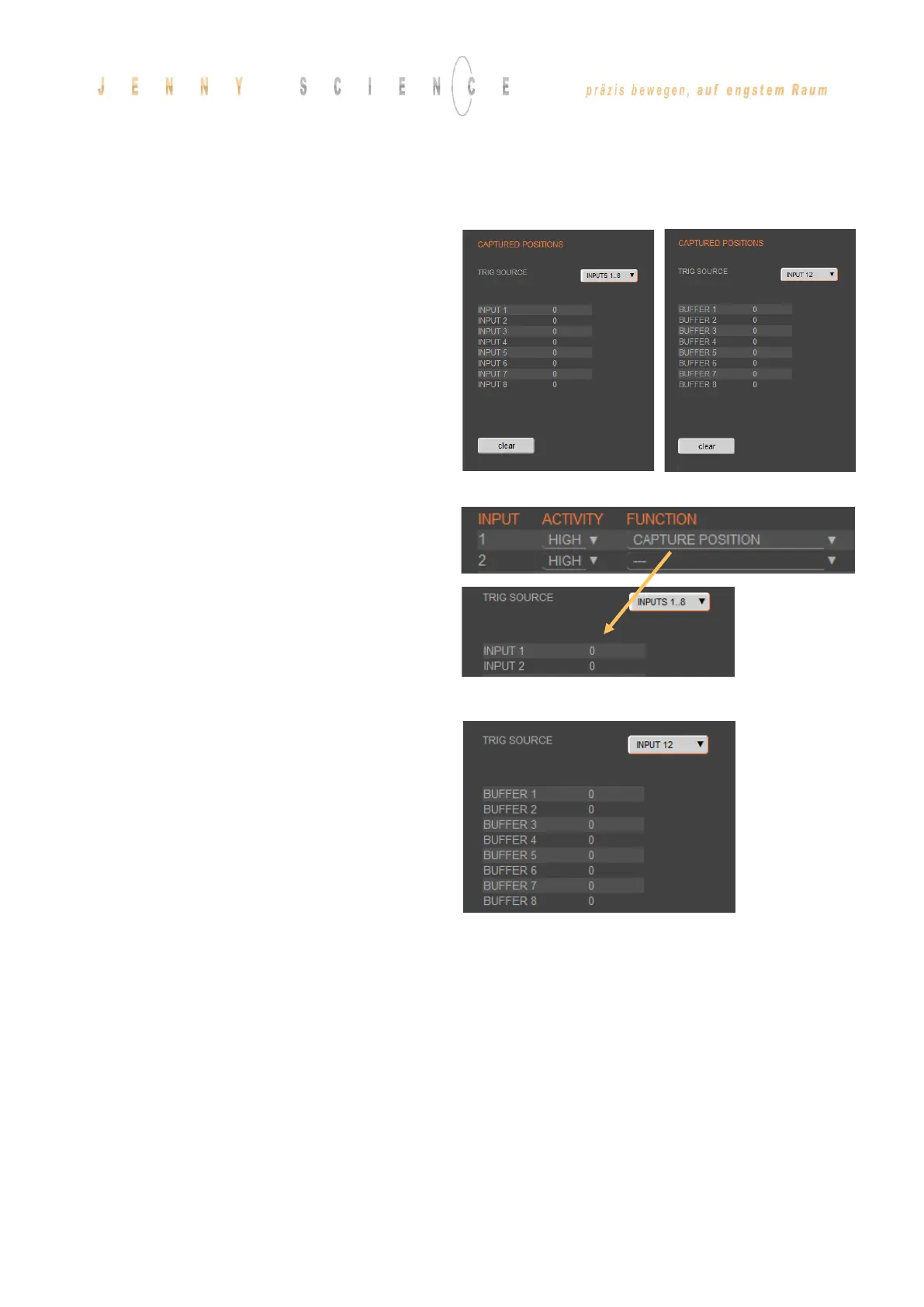
10.15 Captured Pos
The XENAX® servo controller has two special functions
to read the current position of the motor.
Record function of the actual position controlled by Input
In the WebMotion® menu I/O, you can select the
record function CPOS for all digital inputs 1-8.
Reaction time > 4 ms.
(Input 1 = Pos Input 1 etc.
ASCII command: TCPn (n = register number)
Record function of the actual position controlled by edge
With each increasing edge at input 12, the current
position of the motor is written in a buffer register
(Start is Captured Pos 1).
Reaction time ~ 4-6μs.
(First edge position = Captured Pos 1 etc.)
ASCII command: TCPn (n = register number)
Function is available over Jenny Science bus module in
asynchronous operation, too.
 Loading...
Loading...