Appendix-79
2.4 Errors involving change in specification
The specification of the following errors changes when the safety monitoring function used in the robot safety
option (4F-SF002-01) is enabled.
For the RV-5AS, safety monitoring functions are enabled.
To reset the following errors while the safety monitoring function is enabled, reset the power supply.
14
The communication fault occurs by the equipment connected to the Ethernet cable inside the robot arm.
Cause
・ The Ethernet cable is not connected surely.
・ There are the device etc. which cause the noise and the noise has applied to the Ethernet cable.
Measures
・ Confirm that the Ethernet cable is connected surely.
・ If the effect by the noise can be considered, find out the noise source and remove the noise. Moreover, adds the
grounding and ferrite core of the Ethernet cable if needed.
Recommendation ferrite core: E04SR301334 (SEIWA ELECTRIC MFG. Co.,Ltd.)
15
The T/B does not display anything.
Cause
・ The fuse installed in the controller may have blown out. For the fuse blowout, there may be a ground fault or
short circuit in the T/B cable.
・ The T/B might be out of order.
Measures
・ Investigate and correct the ground fault or short circuit portion in the wiring made by the customer.
If no improvement is made after carrying out the above measures, please contact the manufacturer.
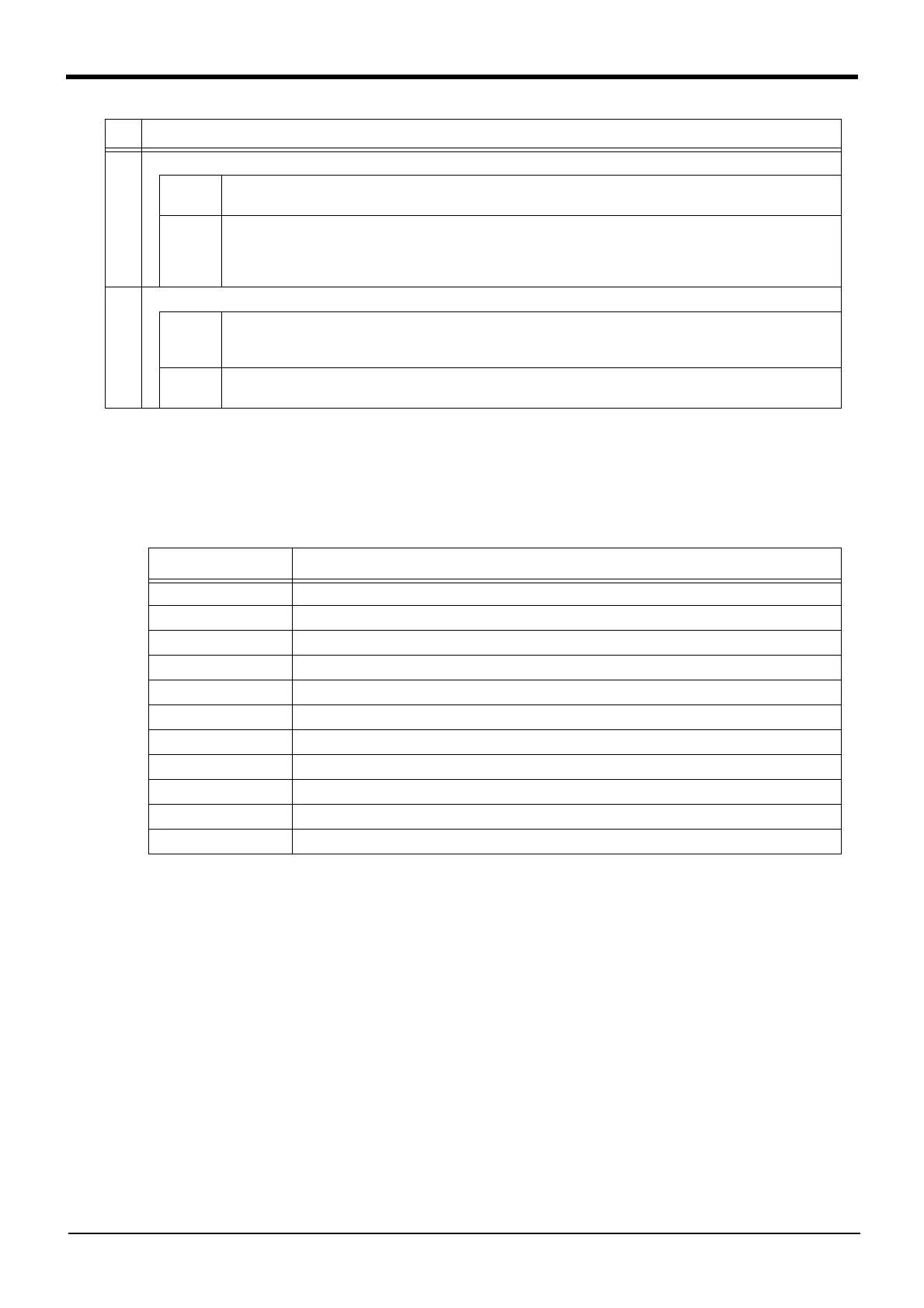
Error Error message
H0039 Door Switch Signal line is faulty.
H0048 Faulty line (Mode Selector switch)
H0049 Faulty Line (T/B Enable Switch)
H0051 Wiring of the external emergency stop is abnormal.
H0061 EMG line is faulty.(O.Panel)
H0071 EMG line is faulty.(T.Box)
H0074 Faulty line (T/B Enable/Disable).
H1680 Cannot servo ON (timeout)
H1681 Unexpected servo OFF
H1682 Servo ON Timeout (Safety relay).
H1683 Servo ON Timeout. (Contactor)
No. Issue

 Loading...
Loading...




