Appendix-80
2.5 Force sense interface unit errors
The errors of the force sense interface unit used in the force sense function option.
Table 2-1 : Force sense interface unit errors
Error No. (Name) Cause Remedy
12 (memory error) Force sense interface unit internal part fault Replace the unit.
13 (S/W processing error)
21 (sensor initial communication
error)
1) The force sensor connection cable is
disconnected.
2) The force sensor connection cable is damaged.
3) Noise contamination occurred.
1) Connect the cable.
2) Replace the cable.
3) Perform noise countermeasures.
*1)
*1) Measures against noise are as follows. Take appropriate measures for the usage environment. You do not always have to take all the
measures. Perform them as necessary.
1) Install a noise filter on the power supply of peripheral equipment.
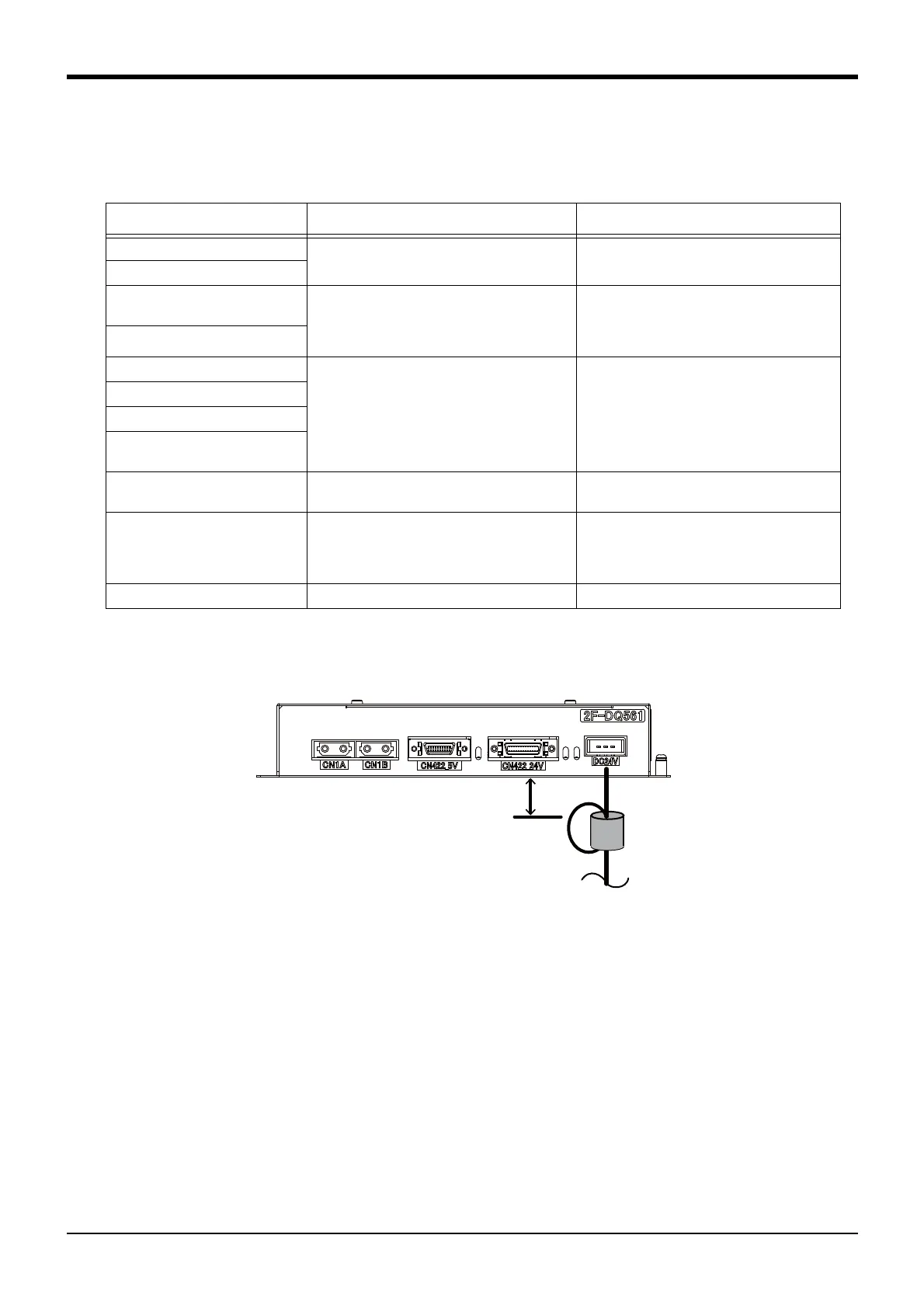
2) Add a ferrite core to the 24 V power supply output cable. (Refer to the following figure.)
Install the ferrite core properly to avoid weighting the cable and connector.
25 (sensor communication error)
34 (communication data error) 1) The SSCNET III cable is disconnected.
2) The SSCNET III cable end face is dirty.
3) The SSCNET III cable is damaged.
4) Noise contamination occurred.
1) Connect after turning OFF the power.
2) Wipe any dirt from the end face.
3) Replace the cable.
4) Perform noise countermeasures.
*1)
36 (communication error)
38 (communication frame error)
39 (communication axis information
error)
37 (parameter error) The parameter value sent from the robot
controller at the power-on is incorrect.
Correct the setting value of parameter
FSFLCTL.
88 (watchdog) The robot controller does not operate normally. 1) Turn on the power supply of the robot
controller again.
2) If it comes back, contact to your service
provider.
E4 (parameter warning) The input value of the parameter is incorrect. Correct the value input in parameter FSFLCTL.

 Loading...
Loading...




