2-7 Standard specifications
2Robot arm
2 Robot arm
2.1 Standard specifications
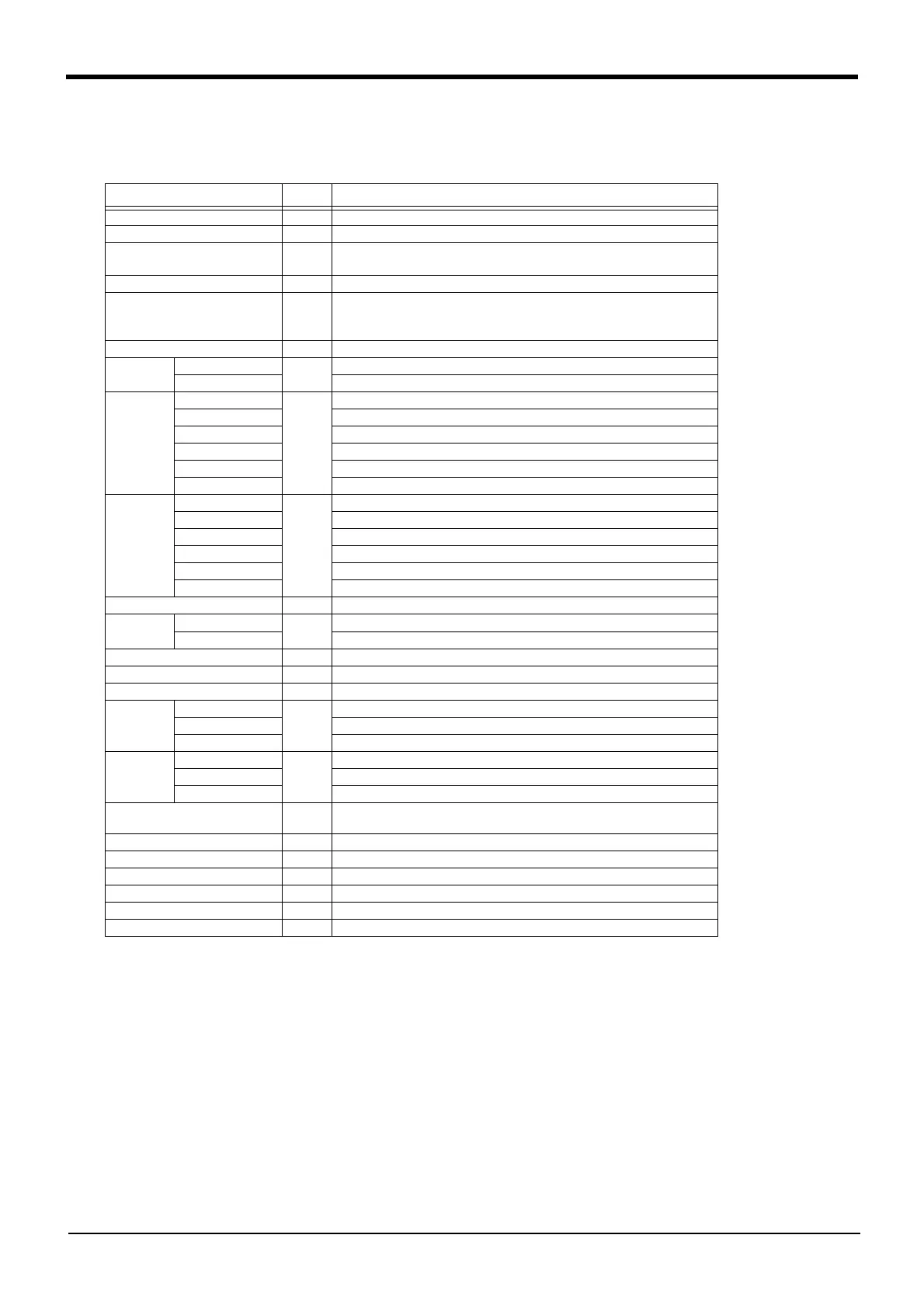
Table 2-1 : Standard specifications of robot
Item Unit Specifications
Type
RV-2SD/2SDB
Note1)
Note1) RV-2SDB is with the brake to all the axes.
Degree of freedom
6
Installation posture
On floor, hanging
(against wall
Note2)
)
Note2) When used by mounting on the wall, a special specification that limits the operating range of the
J1 axis will be used. Please give an order separately.
Structure Vertical, multiple-joint type
Drive system
AC servo motor
(RV-2S
D: J2, J3, J5 axes have the brake)
(RV-2S
DB: All axes have the brake)
Position detection method Absolute encoder
Arm length Upper arm
mm 2 3 0
Fore arm
270
Operating
range
Waist (J1) Degree
480 (-240~+240)
Shoulder (J2)
240 (-120~+120)
Elbow (J3)
160 (0~+160)
Wrist twist (J4)
400 (-200~+200)
Wrist pitch (J5)
240 (-120~+120)
Wrist roll (J6)
720 (-360~+360)
Speed of
motion
Waist (J1) Degree
/s
225
Shoulder (J2)
150
Elbow (J3)
275
Wrist twist (J4)
412
Wrist pitch (J5)
450
Wrist roll (J6)
720
Maximum resultant velocity
Note3)
Note3) This is the value on the mechanical interface surface when all axes are combined.
mm/sec
4,400
Load
Maximum
Note4)
Note4) The maximum load capacity is the mass with the mechanical interface posture facing down word
at the ±10°limit.
kg 3 . 0
Rating
2. 0
Pose repeatability
Note5)
Note5) The pose repeatability details are given in Page 8, "2.2.1 Pose repeatability"
mm ± 0. 0 2
Ambient temperature
℃0~40
Mass
kg 1 9
Allowable
moment
load
Wrist twist (J4)
N・m
4. 1 7
Wrist pitch (J5)
4. 1 7
Wrist roll (J6)
2. 4 5
Allowable
inertia
Wrist twist (J4)
kg ・ m
2
0. 1 8 (0. 2 7)
Wrist pitch (J5)
0. 1 8 (0. 2 7)
Wrist roll (J6)
0. 0 4 (0. 1)
Arm reachable radius front p-
axis center point
mm
504
Tool wiring
Note6)
Note6) The pneumatic hand interface (option) is required when the tool (hand) output is used. Also, if the
solenoid set (option) is used, four points of hand outputs are used for other options.
Hand input 4 point / hand output 4 point
Tool pneumatic pipes
Primary side: Φ4 x 4 (Base to fore arm section)
Supply pressure
MPa 0 . 5 ± 1 0 %
Protection specification
Note7)
Note7) The protection specification details are given in Page 10, "2.2.3 Protection specifications".
IP30 (All axis)
Degree of cleanliness
-
Painting color Light gray (Equivalent to Munsell: 0.08GY7.64/0.81)
 Loading...
Loading...




