5-5
5-4 Process Data Objects (PDOs)
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
5
EtherCAT Communications
5-4 Process Data Objects (PDOs)
The process data objects (PDOs) are used to transfer data during cyclic communications in
realtime. PDOs can be reception PDOs (RxPDOs), which receive data from the controller, or
transmission PDOs (TxPDOs), which send status from the Servo Drive to the host controller.
The EtherCAT application layer can hold multiple objects to enable transferring Servo Drive
process data. The contents of the process data are described in the PDO Mapping object and
the Sync manager PDO assignment object.
OMNUC G5-series Servo Drives support PDO mapping for position control.
PDO Mapping Settings
The PDO mapping indicates the mapping for application objects (realtime process data)
between the object dictionary and PDO. The number of mapped objects is described in sub-
index 0 of the mapping table. In this mapping table, 1600 hex to 17FF hex are for RxPDOs and
1A00 hex to 1BFF hex are for TxPDOs.
G5-series Servo Drives use 1701 hex for RxPDOs and 1B01 hex for the TxPDOs.
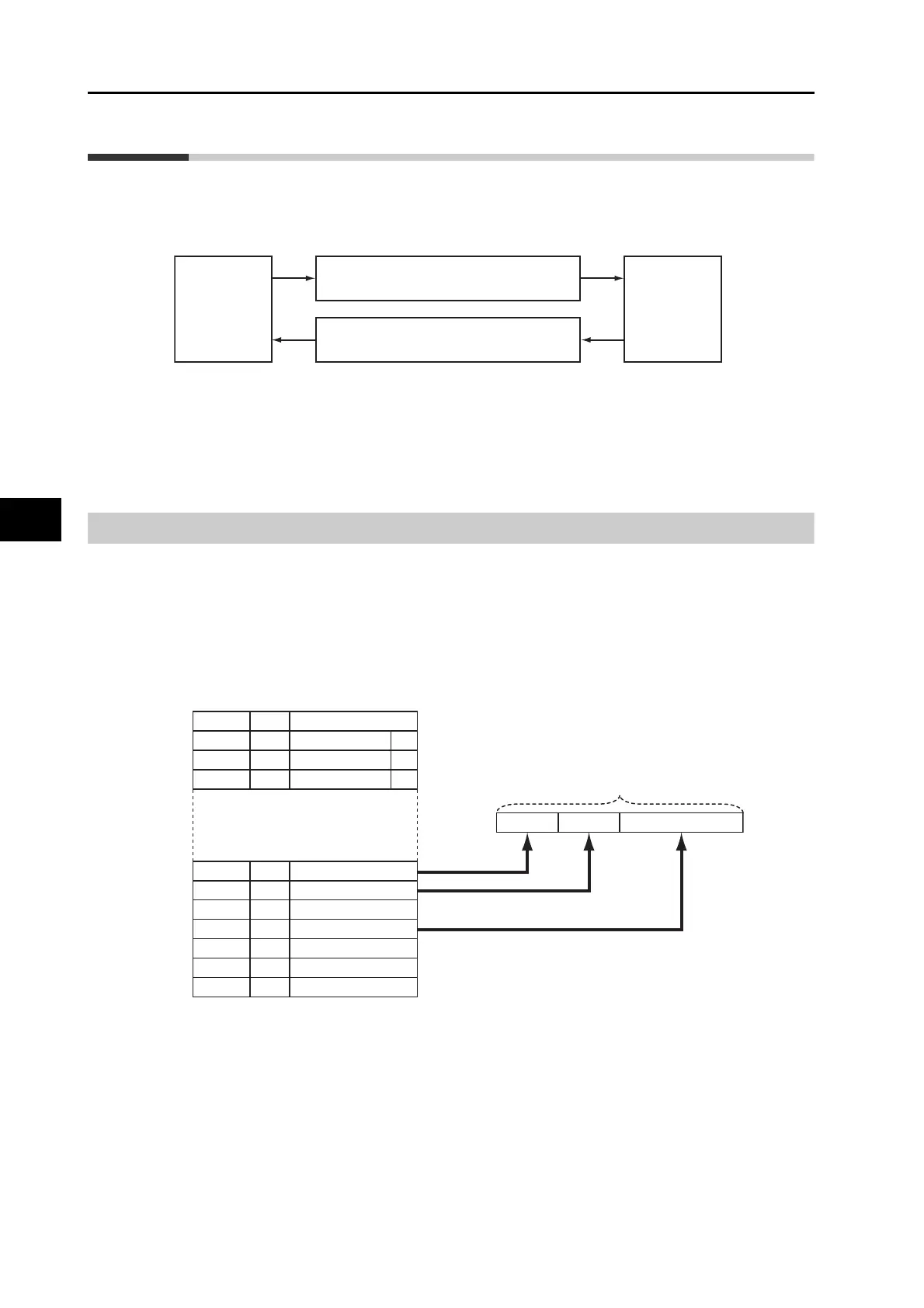
The following table is an example of PDO mapping.
Host
Controller
Servo Drive
RxPDO
Operation command, target position, etc.
TxPDO
Operation status, actual position, etc
6TTTh
ZZh
Index
Sub
6UUUh UUh
16
Object contents
1ZZZh
1ZZZh
1ZZZh
01h
02h
03h
6TTTh TTh
YYYYh YYh
8
8
6UUUh
6VVVh
6YYYh
UUh
VVh
YYh
TTh Object A
Object B
6ZZZh
Object C
Object D
Object E
Application objects Mapping objects
Object Dictionary
Object A Object B Object D
PDO_1
PDO-Length: 32 bits
 Loading...
Loading...