11-25
11-8 Disturbance Observer Function
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
11
Adjustment Functions
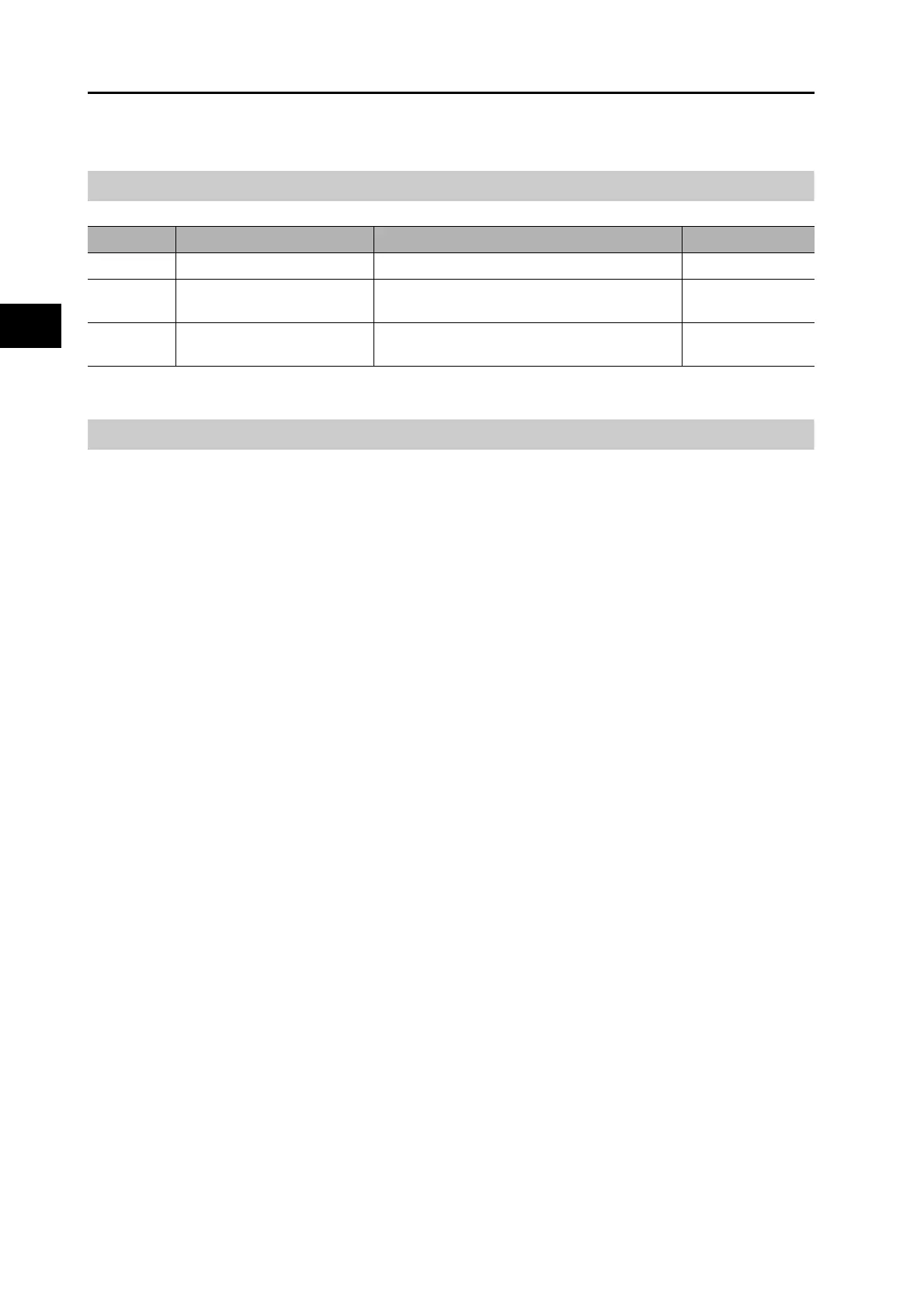
Objects Requiring Settings
Operating Procedure
1. Set the Function Expansion Setting (3610 hex).
Set whether to enable or disable the disturbance observer in bit 1.
0: Disabled
1: Enabled
Set the operating conditions for enabling the function in bit 2.
0: Enabled at all time
1: Enabled only when gain 1 is selected
2. Set the Disturbance Observer Filter Setting (3624 hex).
Set a small value for the Disturbance Torque Compensation Gain (3623 hex).
Change the value in the Disturbance Observer Filter Setting (3624 hex) from a large value
gradually to a smaller one.
The smaller the value set of the Disturbance Observer Filter Setting (3624 hex) is, the lesser
disturbance torque lag can be estimated, and the more effective control over the disturbance
influence can be obtained. But the smaller the value is, the larger the operation noise can be.
You must consider the balance of these advantage and disadvantage to set a value.
3. Set the Disturbance Torque Compensation Gain (3623 hex).
After you set the Disturbance Observer Filter Setting (3624 hex), increase the value of the
Disturbance Torque Compensation Gain (3623 hex) from a small value to a large value. The
larger the value set on the Disturbance Torque Compensation Gain (3623 hex) is, the more
effective control over the disturbance influence can be obtained. But the larger the value is, the
larger the operation noise will be. Set this object in combination with the Disturbance Observer
Filter Setting (3624 hex) to achieve balanced settings.
Index Name Description Reference
3610 hex Function Expansion Settings Set the bits related to the disturbance observer. page 9-38
3623 hex
Disturbance Torque
Compensation Gain
Set the compensation gain for disturbance
torque.
page 9-40
3624 hex
Disturbance Observer Filter
Setting
Set the filter time constant for disturbance torque
compensation.
page 9-40
 Loading...
Loading...