9-40
9-7 Special Objects
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
9
Details on Servo Parameter Objects
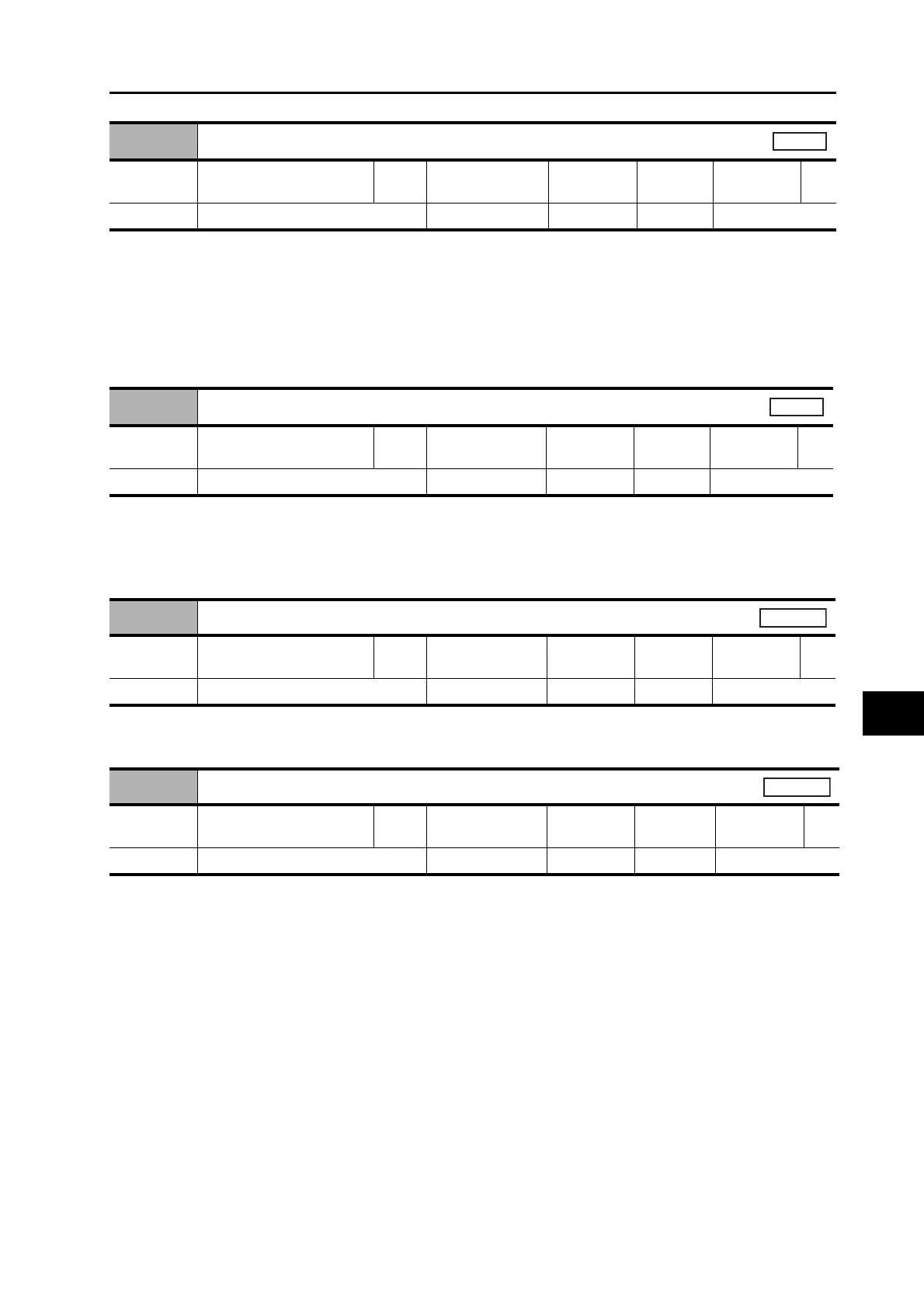
If the motor speed exceeds the set value during an immediate stop resulting from an error, an
Overspeed 2 Error (Error No. 26.1) will occur.
The overspeed detection level setting is 1.2 times the maximum motor rotation speed if this object
is set to 0.
This object should normally be set to 0. The setting should be changed only when it is necessary
to lower the overspeed detection level.
Refer to Immediate Stop Operation on page 12-12 in 12-3 Errors on page 12-7.
Set the initialization time after turning ON the power supply to the standard 1.5 seconds plus the
specified value.
Refer to the Control Output Sequence in 3-1 Servo Drive Specifications
on page 3-1
for the details at power
ON.
Set the compensation gain for the disturbance torque.
Refer to 11-8 Disturbance Observer Function on page 11-24.
Set the filter time constant for disturbance torque compensation.
Refer to 11-8 Disturbance Observer Function on page 11-24.
3615 hex
Overspeed Detection Level Setting at
Immediate Stop
Setting
range
0 to 20,000 Unit r/min
Default
setting
0
Data
attribute
A
Size 2 bytes (INT16) Access RW PDO map Not possible.
All
3618 hex
Power Supply ON Initialization Time
Setting
range
0 to 100 Unit 0.1 s
Default
setting
0
Data
attribute
R
Size 2 bytes (INT16) Access RW PDO map Not possible.
3623 hex
Disturbance Torque Compensation Gain
Setting
range
−100 to 100 Unit %
Default
setting
0
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
All
csp semi
3624 hex
Disturbance Observer Filter Setting
Setting
range
10 to 2500 Unit 0.01 ms
Default
setting
53
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
csp semi
 Loading...
Loading...