9-10
9-2 Gain Settings
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
9
Details on Servo Parameter Objects
Set the time constant for the first-order lag filter inserted into the feed-forward.
Setting the filter may improve operation if speed overshooting occurs or the noise during operation
is large when the feed-forward is set high.
Refer to 11-11 Feed-forward Function on page 11-29.
Set the feed-forward gain in torque control. Increasing the set value decreases the position error
and increases the responsiveness. Overshooting, however, will occur more easily.
Refer to 11-11 Feed-forward Function on page 11-29.
Set the time constant for the first-order lag filter inserted into the feed-forward.
Setting the filter may improve operation if speed overshooting occurs or the noise during operation
is large when the feed-forward is set high.
Refer to 11-11 Feed-forward Function on page 11-29.
Select either PI/P operation switching or gain 1/gain 2 switching.
The PI/P operation switching is performed with the Speed Loop PI/P Control command in
EtherCAT communications.
Refer to 7-9 Gain Switching 3 Function on page 7-30 for the Gain 1/Gain 2 switching.
Explanation of Set Values
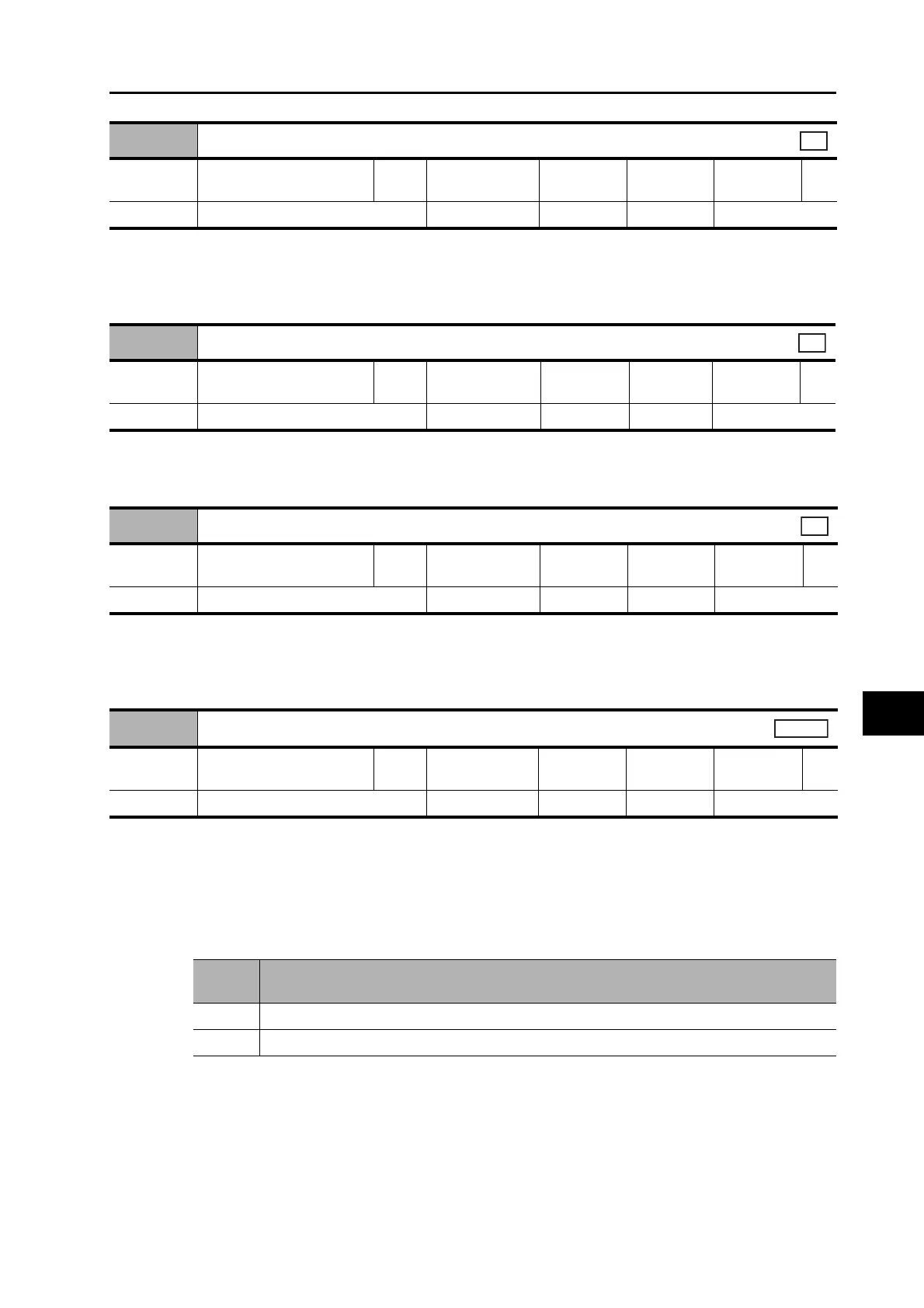
3111 hex
Speed Feed-forward Command Filter
Setting
range
0 to 6400 Unit 0.01 ms
Default
setting
50
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
csp
3112 hex
Torque Feed-forward Gain
Setting
range
0 to 1000 Unit 0.1%
Default
setting
0
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
csp
3113 hex
Torque Feed-forward Command Filter
Setting
range
0 to 6400 Unit 0.01 ms
Default
setting
0
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
csp
3114 hex
Gain Switching Input Operating Mode Selection
Setting
range
0 to 1 Unit −
Default
setting
1
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
All
Set
value
Description
0 Gain 1 (PI/P switching enabled)
1 Gain 1/gain 2 switching available
 Loading...
Loading...