9-29
9-5 Interface Monitor Settings
OMNUC G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
9
Details on Servo Parameter Objects
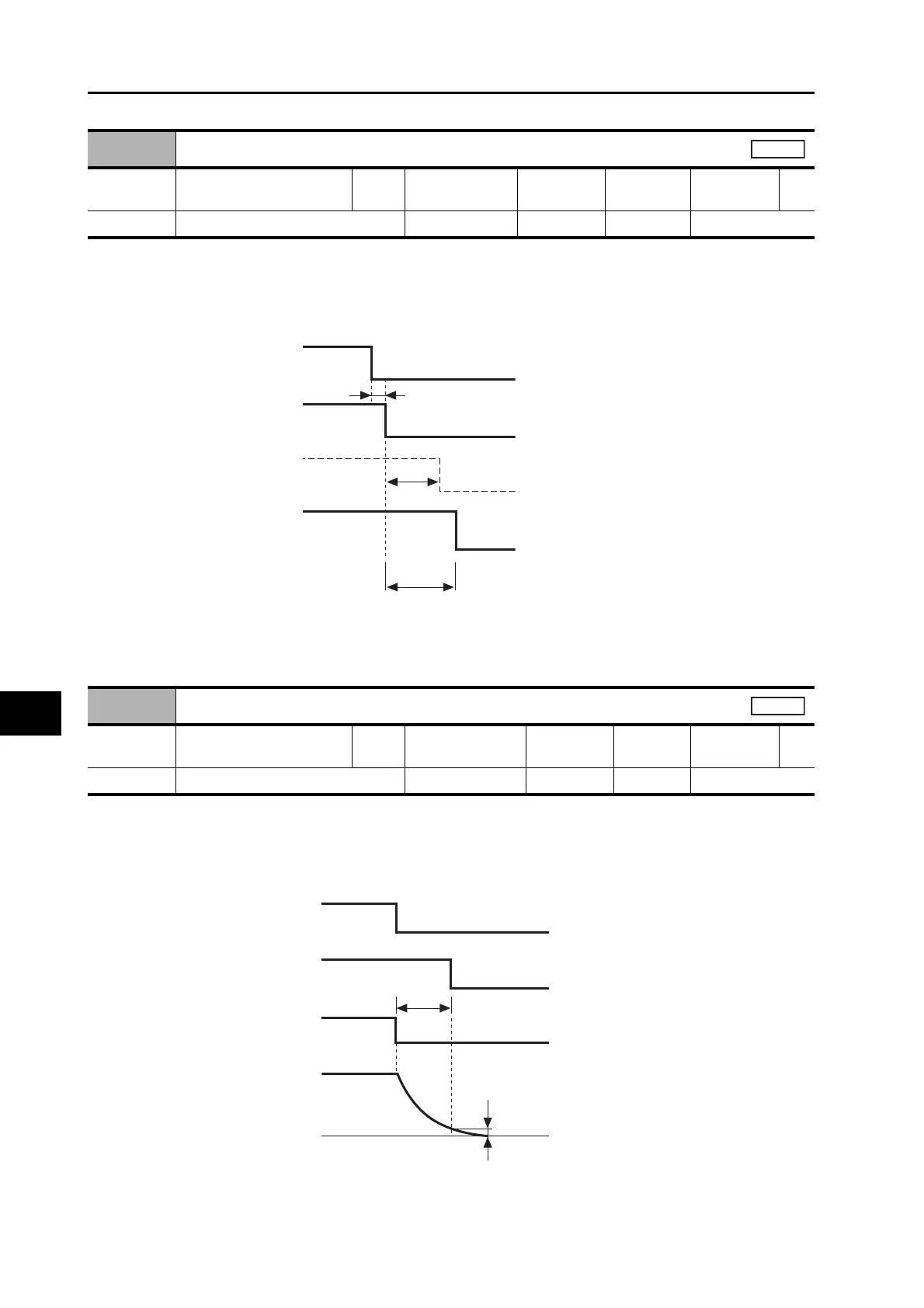
Set the time required for the Servomotor to be de-energized (servo free) after the brake interlock
output (BKIR) turns OFF (i.e., brake held), when servo OFF status is entered while the Servomotor
is stopped.
When the servo is turned OFF while the Servomotor is stopped, the brake interlock output (BKIR)
turns ON, and the servo is de-energized after waiting for the set time (set value × ms).
Make the setting as follows to prevent the machine (workpiece) from moving or falling due to the
delay time in the brake operation (tb).
Brake timing when stopped (set value × 1 ms) ≥ tb
For the operation time, refer to 7-5 Brake Interlock on page 7-13.
Set the required time for the Brake Interlock Output (BKIR) to turn OFF after the operation
command (RUN) is detected to be OFF, when servo OFF status is entered while the Servomotor
is operating. When the servo is turned OFF while the Servomotor is operating, the motor
decelerates to reduce rotation speed, and the brake interlock output (BKIR) turns ON after the set
time (set value × 1 ms) has elapsed.
The time T
B in above drawing is either the brake timing during operation (i.e., the set value × 1 ms)
or the time taken until it goes below the value set in the Brake Threshold Speed During Operation
(3439 hex), whichever is shorter.
3437 hex
Brake Timing when Stopped
Setting
range
0 to 10000 Unit ms
Default
setting
0
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
All
Servo ON/OFF
Brake interlock
(BKIR)
ctual brake
Motor power
is supplied.
Released
Held
Released
Power
supply
Held
No power
supply
3437 hex
tb
1 to 6 ms
3438 hex
Brake Timing During Operation
Setting
range
0 to 10000 Unit ms
Default
setting
0
Data
attribute
B
Size 2 bytes (INT16) Access RW PDO map Not possible.
All
TB
Servo ON/OFF
Brake interlock
(BKIR)
Motor speed
Released Held
Motor power
is supplied.
Power
supply
No power
supply
Max. 3438 hex or
3439 hex set value
 Loading...
Loading...