-
59
--
58
-
Detail of parameters
Gain switching function
You can switch the gain parameter automatically while the motor is in run-command and is
at standstill.
During the automatic gain switching (Pr36 = 2), the 2nd gain is applied while the motor is in
runcommand, and the 1st gain is applied while the motor is at standstill.
With this gain switching function, you can change the holding torque at the motor standstill
by setting different values of torque limit between 1st and 2nd gain.
Parameter name
Parameter number
Supplement
The 1st gain
when
(
stopped
)
The 2nd gain
during
(
instruction
)
Position loop gain 28 30 Determines the response of position control.
Velocity loop gain 29 31 Determines the response of velocity loop.
Velocity loop integration
gain
2A 32 Determines the rigidity of velocity loop.
Velocity feed forward 2b 33
Function to forward (add) position instruction
to commanded speed
Speed detection lter 2C 34
Sets the time constant of low-pass lter of
speed feedback.
Velocity feed forward
time constant
2d Filter in velocity feed forward
Torque limit 2E 35 Limits the output torque of motor.
Gain switching mode
selection
36
0
: The 1st gain xed
1
: The 2nd gain xed
2
: Automatic switching
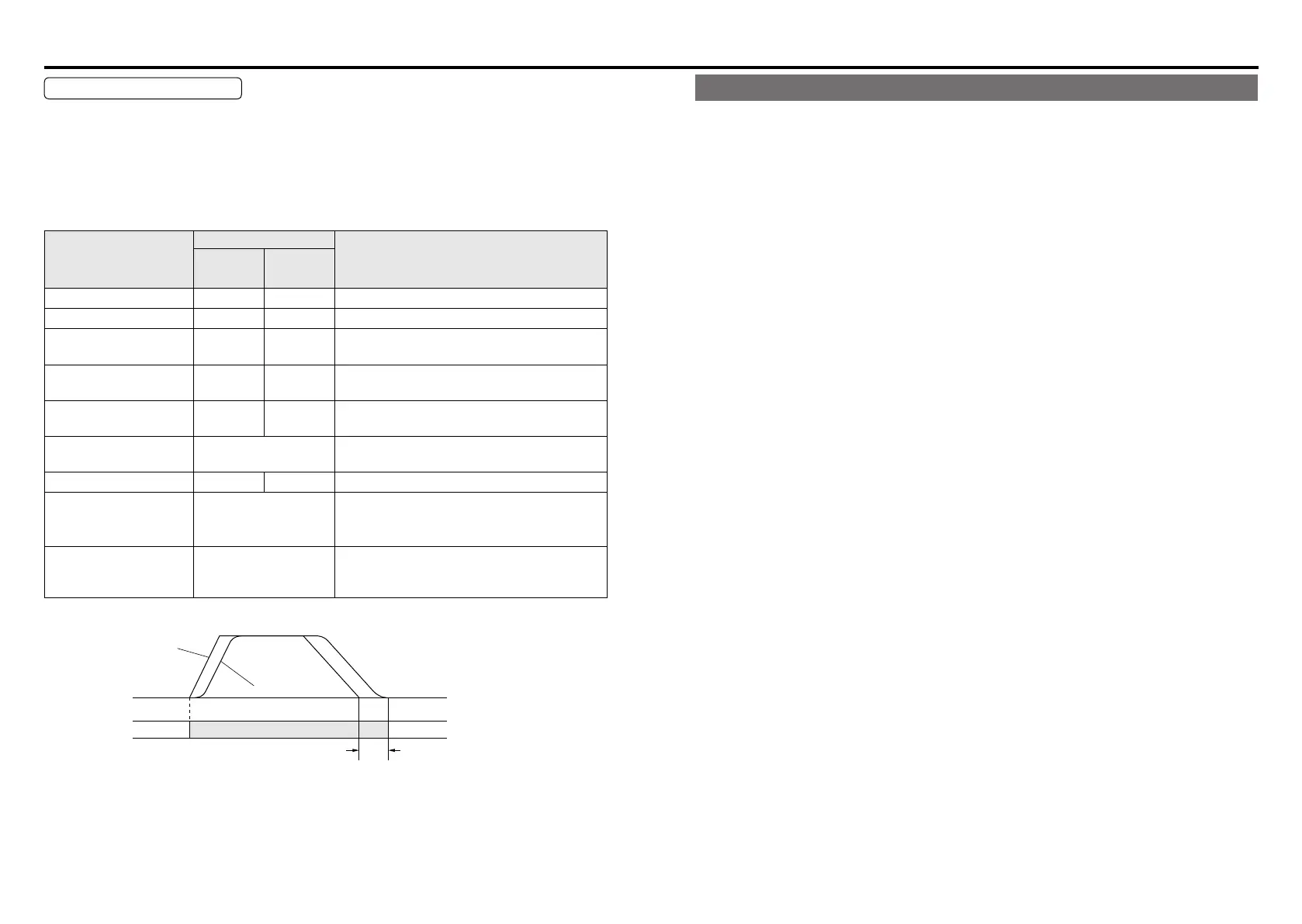
Gain switching time 37
Changes to the 1st gain in the time set
by parameter after command output is
completed. Unit [ms].
Commanded
Pr37
Actual speed
Gain
The 1st gain The 2nd gain The 1st gain
Speed
Operation is as follows when Pr36 is “2”.
Note)
It is not allowed to set switching time in changing from the 1st gain to the 2nd gain in the
start of operation.
Outline of PANATERM for BL
Outline of PANATERM for BL
Communicating software “PANATERM for BL” (download from our web site) can do the
following thing.
(1) Setting and saving of parameters of brushless amplier and writing setting to memory
EEPROM.
(2) Monitor of input/output signals, monitor of a load factor.
(3) The present trip display and reference of a trip history.
(4) Data measurement of waveform graphics, and the call of preservation data.

 Loading...
Loading...







