Revision 2.6 Page 39 of 53
Intuitive Mercury 6-5M Controller with TDB
Warning
Please Note
The specifications of the product detailed on this
Set-Up Guide may change without notice. RDM
Ltd. shall not be liable for errors or for incidental
or consequential damages, directly and indirectly,
in connection with the furnishing, performance or
misuse of this product or document.
Ensure that all power is
switched off before
installing or maintaining
this product
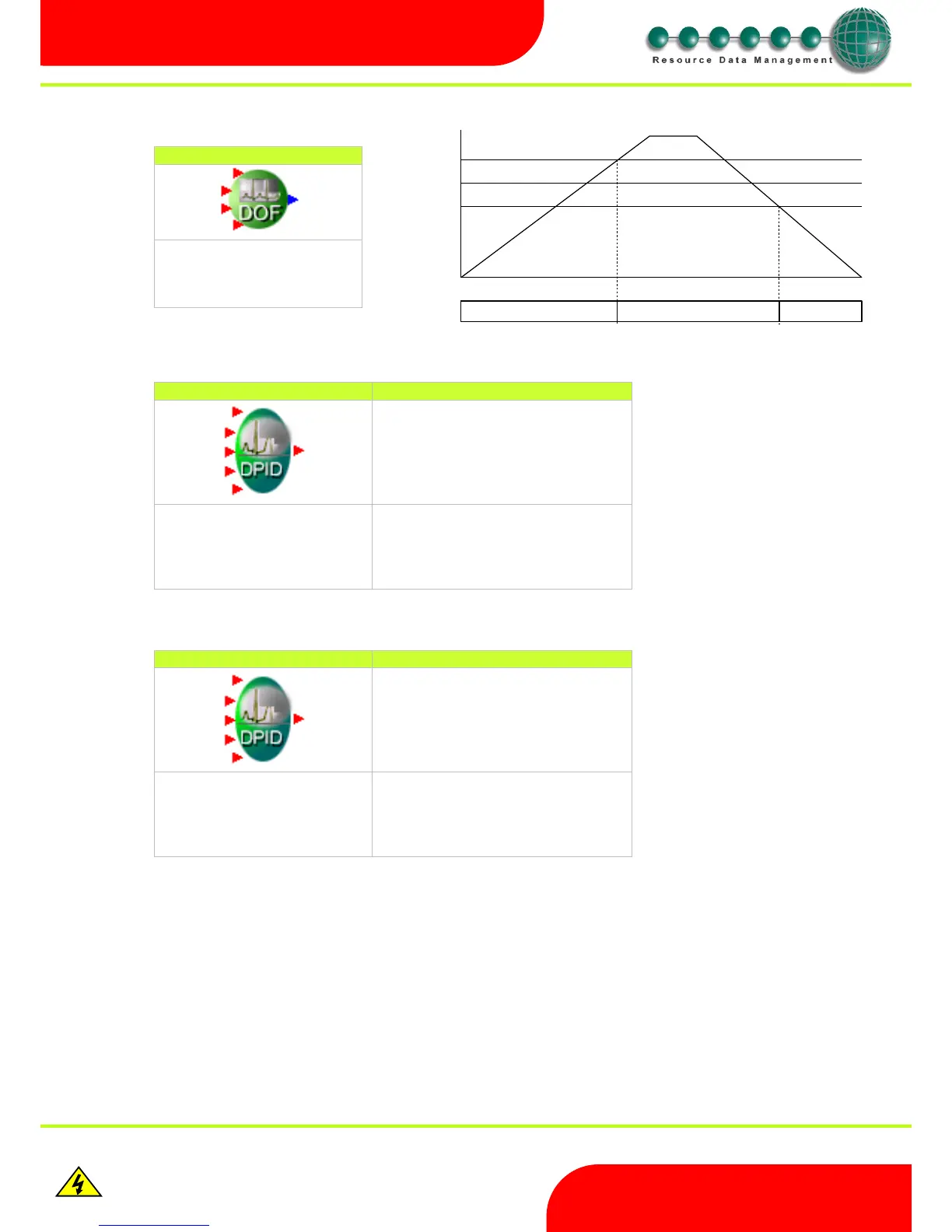
Input A: Analogue input
Input B: Set Point
Input C: Diff above SP
Input D: Diff below SP
Input A: Analogue input
Input B: Set Point
Input C: Proportional constant
Input D: Integral
Input E: Derivative
Input A: Analogue input
Input B: Set Point
Input C: Proportional constant
Input D: Integral
Input E: Derivative
Off On Off
Set Point
Diff above
Diff below
Output
This block performs a PID control
function where the set-point,
proportional, integral and derivative
values can be assigned.
This block performs a PID control
function where the set-point,
proportional, integral and derivative
values can be assigned.
The output will increase when the
analogue input is above setpoint, this
is normally used in cooling
applications
The output will decrease when the
analogue input is above setpoint, this
is normally used in heating
applications.
 Loading...
Loading...
